I am trying to implement the Deep Image Analogy https://arxiv.org/pdf/1705.01088.pdf paper.
The part that I am unable to get to work is the Deconvolution operation that they used (not the same as deconv layer). The logic is as follows:
- Initialise noise
- Pass through a subset of layers from VGG
- Calculate MSE with an existing activations of the same feature map (of another image)
- Backpropagate, and update noise
For a forward pass through a subset of VGG , this is what I am using:
def forward_subnet(self, input_tensor, start_layer, end_layer):
for i, layer in enumerate(list(self.model)):
if i >= start_layer and i <= end_layer:
input_tensor = layer(input_tensor)
return input_tensor
My ‘deconv’ function looks like this :
def get_deconvoluted_feat(feat,feat_layer_num,iters=13):
feat = cn_first(feat)
feat = torch.from_numpy(feat)
if feat_layer_num == 5:
start_layer,end_layer = 20,29
noise = np.random.normal(size=(1,512,28*1,28*1),scale=3)
elif feat_layer_num == 4:
start_layer,end_layer = 11,20
noise = np.random.normal(size=(1,256,56*1,56*1),scale=3)
elif feat_layer_num == 3:
start_layer,end_layer = 6,11
noise = np.random.normal(size=(1,128,112*1,112*1),scale=3)
elif feat_layer_num == 2:
start_layer,end_layer = 1,6
noise = np.random.normal(size=(1,64,224*1,224*1),scale=3)
else:
print("Invalid layer number")
noise = Variable(torch.from_numpy(noise).float(),requires_grad=True)
noise = noise.cuda()
noise = nn.Parameter(noise.data.clone(),requires_grad=True)
optimizer = optim.LBFGS([noise],max_iter=1350,lr=1)
if not next(model.model.parameters()).is_cuda:
model.model = model.model.cuda()
feat = Variable(feat).cuda()
loss = nn.MSELoss(size_average=False)
def closure():
optimizer.zero_grad()
output = model.forward_subnet(input_tensor=noise,start_layer=start_layer,end_layer=end_layer)
loss_valu = loss(output,feat)
loss_valu.backward()
loss_hist.append(loss_valu.data.cpu().numpy())
return loss_valu
loss_hist = []
for i in range(iters):
optimizer.zero_grad()
optimizer.step(closure)
pylab.rcParams['figure.figsize'] = (10, 10)
plt.plot(loss_hist)
plt.show()
noise_cpu = noise.cpu().data.squeeze().numpy()
del feat
del noise
return cn_last(noise_cpu)
The optimised noise is then passed via Patchmatch (which i am fairly confident works)
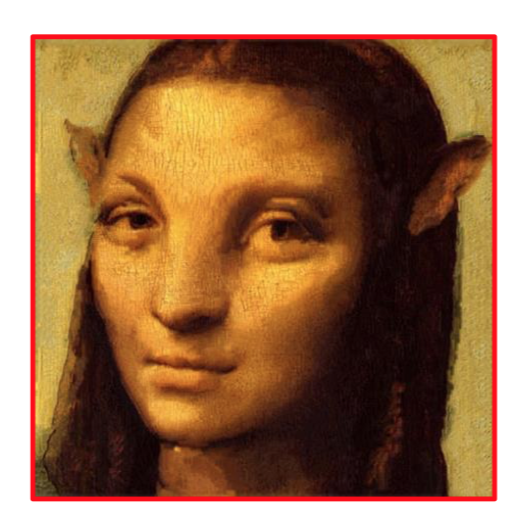
The output of my whole framework is(This was done on ADAM optimiser, not LBFGS,using LBFGS gives garbage-ish results):

as compared to :
This is a tensorflow version that works identical to the paper :
If anybody needs more information , ill be more than happy to provide that.
This is a great project, and I want to port it to pytorch real bad. thanks