Dear,
I’m going to use Mask rcnn inference demo with pre-trained model using image of COCO dataset
I’m following this : GitHub - multimodallearning/pytorch-mask-rcnn
Replace C++ embeding python. NMS and ROIalign
by torchvision.ops.nms() and torchvision.ops.roi_align()
My config is : python 3.8 torch 1.9.1+cu111, torchvision 0.10.1+cu111
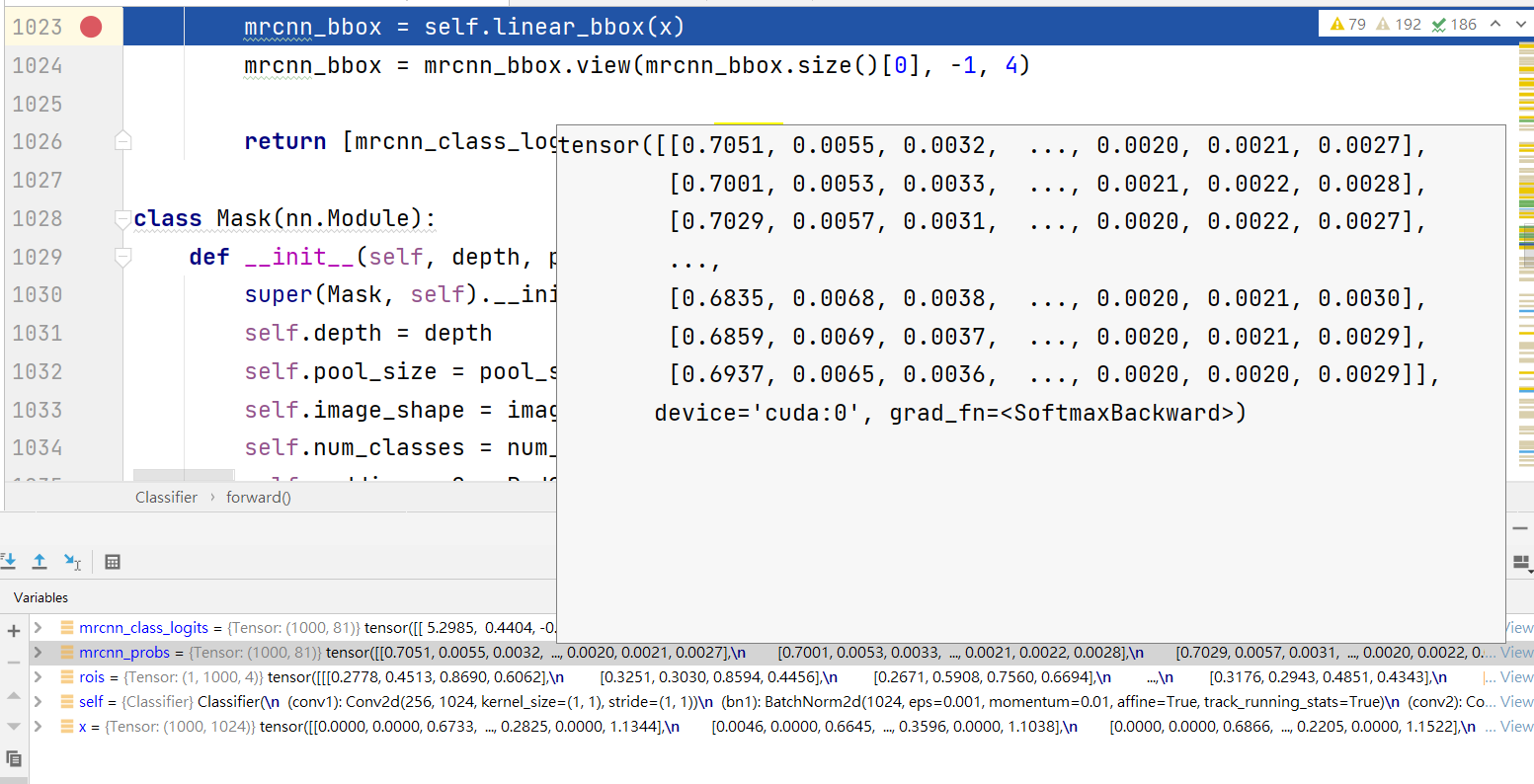
In the “FPN Head classifier” detect ROI mrcnn probalitity always is background
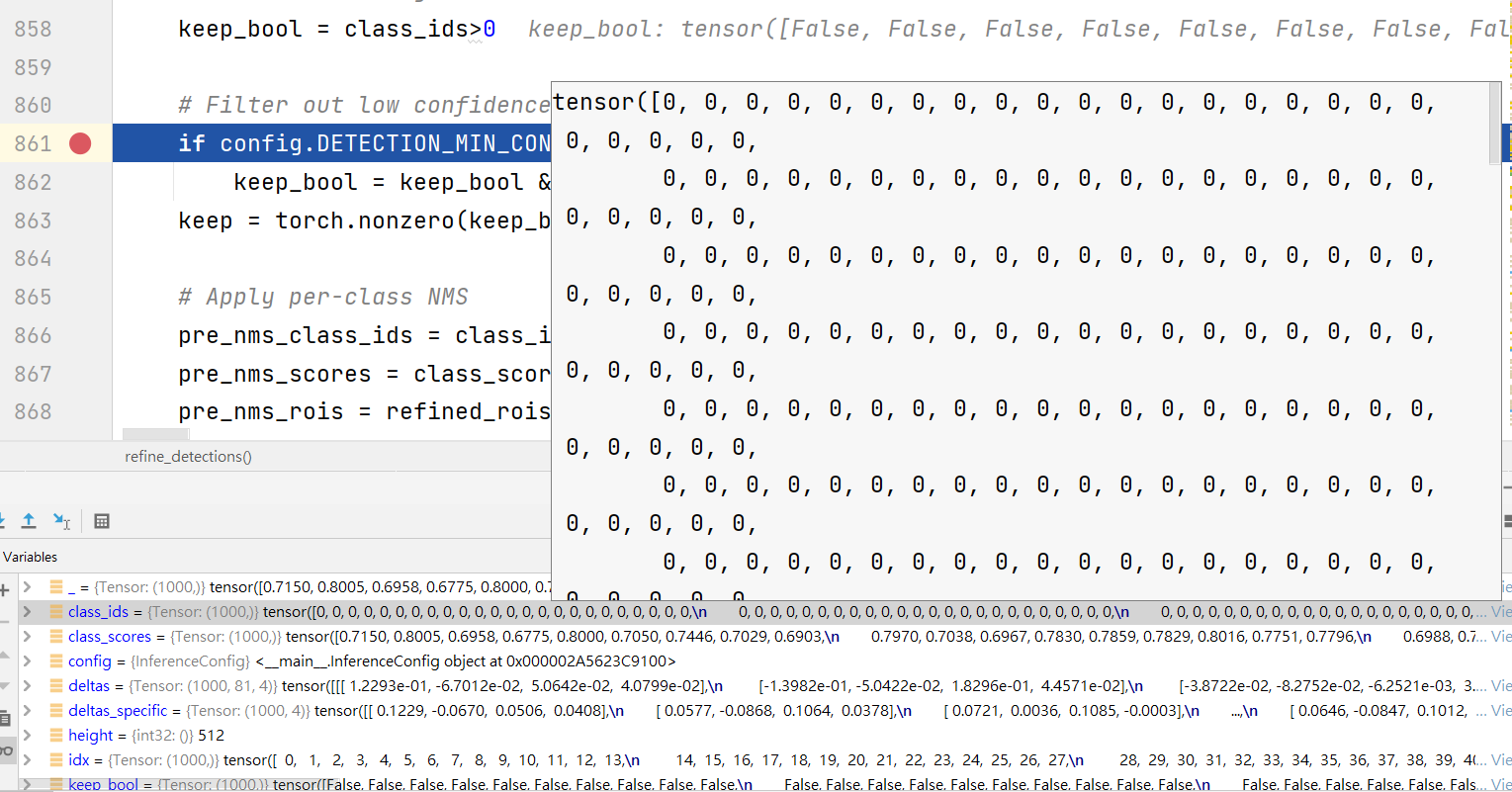
So next step that refine the ROI,
class probability of the top class of each ROI, filter out background boxes is error
because all class probability are background
The error code is :
D:\Ru\pytorch-mask-rcnn\test\model_1028.py:1687: UserWarning: volatile was removed and now has no effect. Use with torch.no_grad(): instead.
molded_images = Variable(molded_images, volatile=True)
C:\Users\admin\anaconda3\envs\torch\lib\site-packages\torch\nn\functional.py:3487: UserWarning: nn.functional.upsample is deprecated. Use nn.functional.interpolate instead.
warnings.warn(“nn.functional.upsample is deprecated. Use nn.functional.interpolate instead.”)
Traceback (most recent call last):
File “D:/Ru/pytorch-mask-rcnn/test/demo_1028.py”, line 99, in
results = model.detect([image])
File “D:\Ru\pytorch-mask-rcnn\test\model_1028.py”, line 1690, in detect
detections, mrcnn_mask = self.predict([molded_images, image_metas], mode=‘inference’)
File “D:\Ru\pytorch-mask-rcnn\test\model_1028.py”, line 1766, in predict
detections = detection_layer(self.config, rpn_rois, mrcnn_class, mrcnn_bbox, image_metas)
File “D:\Ru\pytorch-mask-rcnn\test\model_1028.py”, line 919, in detection_layer
detections = refine_detections(rois, mrcnn_class, mrcnn_bbox, window, config)
File “D:\Ru\pytorch-mask-rcnn\test\model_1028.py”, line 890, in refine_detections
keep = intersect1d(keep, nms_keep)
UnboundLocalError: local variable ‘nms_keep’ referenced before assignment
What do you think? What’s happening?