class Generator(nn.Module):
def init(self):
super(Generator, self).init()
self.model = nn.Sequential(
nn.Linear(NOISE_DIM, 4096),
nn.LeakyReLU(0.2),
nn.Linear(4096, 8192),
nn.LeakyReLU(0.2),
nn.Linear(8192, 4096),
nn.LeakyReLU(0.2),
nn.Linear(4096, 512),
nn.LeakyReLU(0.2)
)
def forward(self, x):
return self.model(x)
class Discriminator(nn.Module):
def init(self):
super(Discriminator, self).init()
self.model = nn.Sequential(
nn.Linear(NOISE_DIM, 4096),
nn.LeakyReLU(0.2),
nn.Linear(4096, 8192),
nn.LeakyReLU(0.2),
nn.Linear(8192, 4096),
nn.LeakyReLU(0.2),
nn.Linear(4096, 1),
nn.ReLU()
)
def forward(self, x):
return self.model(x)
class Classifier(nn.Module):
def init(self):
super(Classifier, self).init()
self.model = nn.Sequential(
nn.Linear(NOISE_DIM, 4096),
nn.LeakyReLU(0.2),
nn.Linear(4096, 8192),
nn.LeakyReLU(0.2),
nn.Linear(8192, 4096),
nn.LeakyReLU(0.2),
nn.Linear(4096, 64),
nn.Sigmoid()
)
def forward(self, x):
return self.model(x)
#loss functions
cross_entropy = torch.nn.BCELoss()
def cos_dis_arr(a,b):
dis_=
for i in range(len(a)):
d =distance.cosine(a[i].detach().numpy(),b[i].detach().numpy())
dis_.append(d)
return(np.array(dis_).mean())
def discriminator_loss(real_features,generated_features,real_output, fake_output):
real_loss = cross_entropy(torch.ones_like(real_output), real_output).clone()
fake_loss = cross_entropy(torch.zeros_like(fake_output), fake_output).clone()
total_loss = real_loss.clone() + fake_loss.clone() #+ 0.01*cos_dis_arr(real_features,generated_features)
#print(total_loss.shape)
return total_loss
def classfier_loss(y_true,y_pred):
return cross_entropy(y_true.double(), y_pred.double())
def generator_loss(real_features,generated_features,y_true,y_pred):
#print(cross_entropy(tf.ones_like(fake_output), fake_output).shape)
a= cross_entropy(y_true.double(), y_pred.double())
b= cos_dis_arr(real_features,generated_features)
c = cross_entropy(torch.ones_like(generated_features), generated_features)
wandb.log({“cross_entrophy”: a, “distance”: b, “discriminator_loss”: c})
return a + c + b
Initialize models and optimizers
generator = Generator()
discriminator = Discriminator()
classifier = Classifier()
generator_optimizer = optim.Adam(generator.parameters(), lr=1e-4, betas=(BETA1,BETA2))
discriminator_optimizer = optim.Adam(discriminator.parameters(), lr=1e-4, betas=(BETA1,BETA2))
classifier_optimizer = optim.Adam(classifier.parameters(), lr=1e-4, betas=(BETA1,BETA2))
def train_step(images, llb):
# 1 - Create noise tensors
noise2 = torch.normal(0,0.2,(BATCH_SIZE, noise_dim))
# 2 - Generate images and calculate loss values
generator_optimizer.zero_grad()
im__=torch.add(images,noise2)
generated_images = generator(im__)
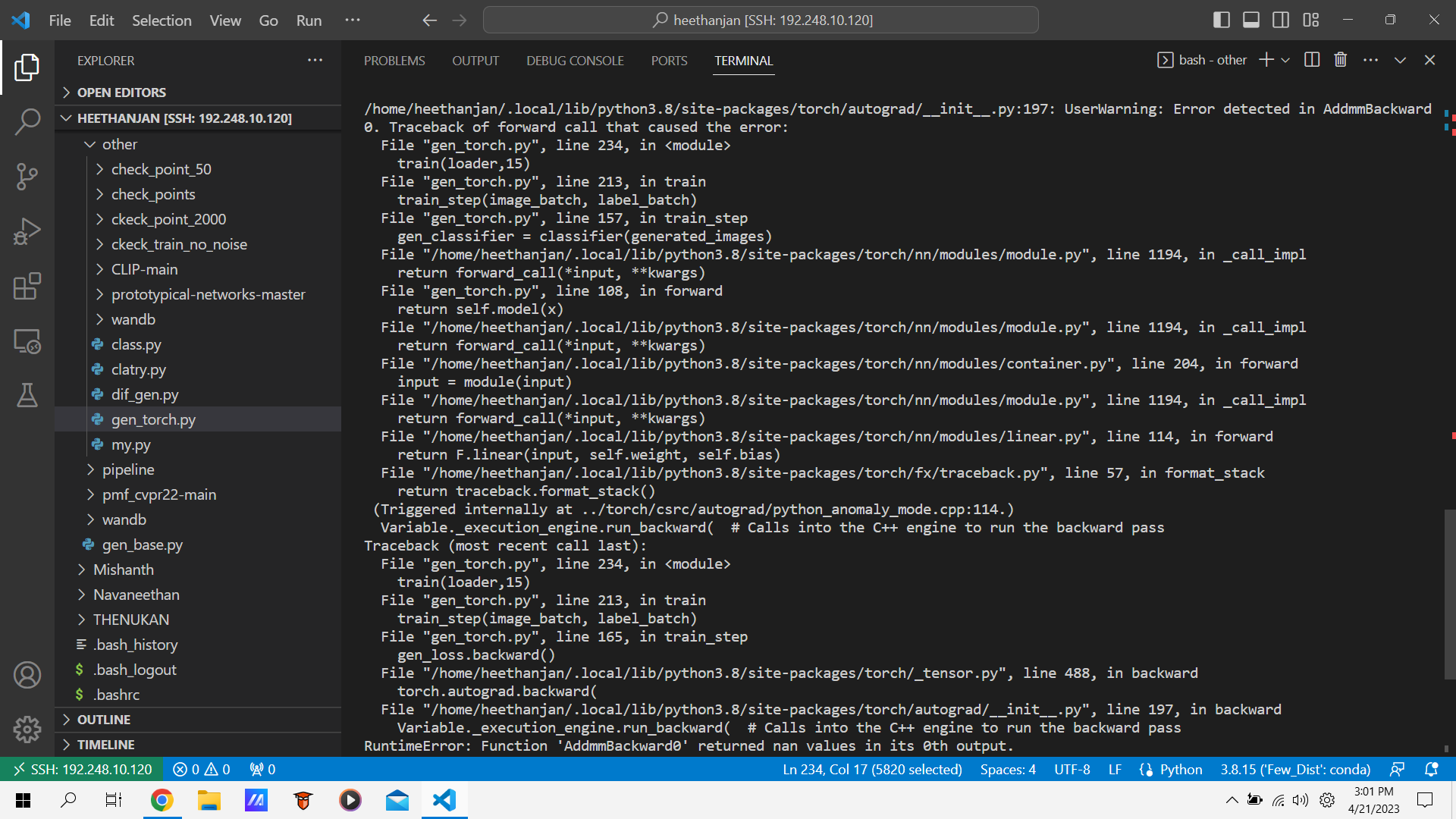
gen_classifier = classifier(generated_images)
real_classifier = classifier(images)
real_output = discriminator(images)
fake_output = discriminator(generated_images)
gen_loss = generator_loss(images, generated_images, llb, gen_classifier)
print("#####genLoss#######")
print(gen_loss)
gen_loss.backward()
generator_optimizer.step()
################
discriminator_optimizer.zero_grad()
im__=torch.add(images,noise2)
generated_images = generator(im__)
gen_classifier = classifier(generated_images)
real_classifier = classifier(images)
real_output = discriminator(images)
fake_output = discriminator(generated_images)
disc_loss = discriminator_loss(images, generated_images, real_output, fake_output)
disc_loss.backward()
discriminator_optimizer.step()
############
clss_loss = classfier_loss(llb, real_classifier)
gen_see = classfier_loss(llb, gen_classifier)
wandb.log({"gen_loss": gen_loss, "gen_see": gen_see, "clas_loss": clss_loss, "dic_loss_disc": disc_loss})
# 3 - Compute gradients and update weights for generator, discriminator and classifier
classifier_optimizer.zero_grad()
clss_loss.backward()
classifier_optimizer.step()
import time
feature generator
def syn_features(model,input_feature,num_of_sin_features):
new_features=
t_in = torch.reshape(input_feature, (1,512))
for i in range(num_of_sin_features):
noise22 = torch.normal(0,0.2,(1, 512))
f_2= torch.add(t_in,noise22)
#noise = tf.random.normal([1, 512])
#inp = tf.concat((f_2,noise),1)
model.eval()
fe = model(f_2)
new_features.append(fe)
return(new_features)
def train(loader,epochs):
for epoch in range(epochs):
start = time.time()
for image_batch, label_batch in loader:
train_step(image_batch, label_batch)
if (epoch + 1) % 3 == 0:
# There is no Checkpoint object in PyTorch; saving weights can be done as follows:
pass
print(‘Time for epoch {} is {} sec’.format(epoch + 1, time.time() - start))
print(“small Test”)
f = random.choice(features)
# noise = torch.randn([1, 512])
noise22 = torch.normal(0,0.2,(1, 512))
f_ = f.reshape((1, 512))
f_2 = f_ + noise22
# inp = torch.cat((f_, noise), 1)
generator.eval()
gen = generator(f_2)
t_in = gen.reshape((512, ))
d = distance.cosine(f, t_in)
print(f)
print(gen)
print(d)
train(loader,15)