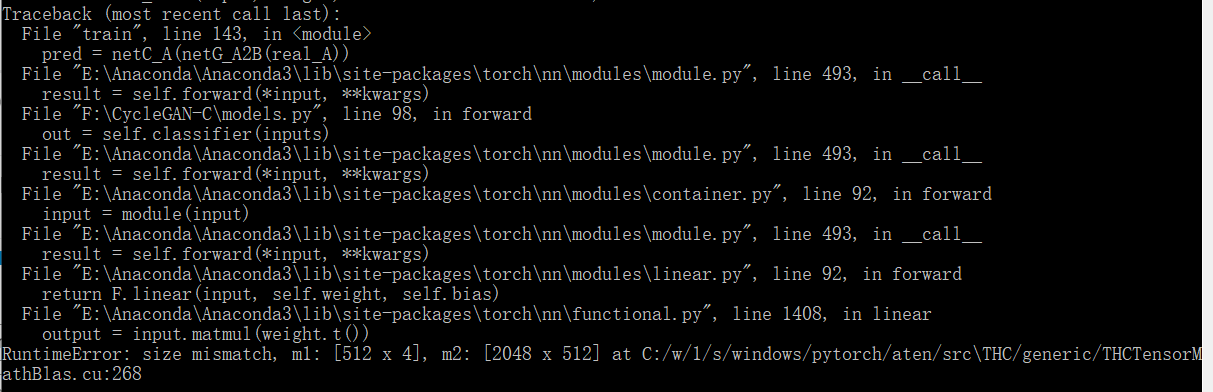
Where should I locate this error? And how will I correct it?
import torch.nn as nn
import torch.nn.functional as F
class ResidualBlock(nn.Module):
def __init__(self, in_features):
super(ResidualBlock, self).__init__()
conv_block = [ nn.ReflectionPad2d(1),
nn.Conv2d(in_features, in_features, 3),
nn.InstanceNorm2d(in_features),
nn.ReLU(inplace=True),
nn.ReflectionPad2d(1),
nn.Conv2d(in_features, in_features, 3),
nn.InstanceNorm2d(in_features) ]
self.conv_block = nn.Sequential(*conv_block)
def forward(self, x):
return x + self.conv_block(x)
class Generator(nn.Module):
def __init__(self, input_nc, output_nc, n_residual_blocks=9):
super(Generator, self).__init__()
# Initial convolution block
model = [ nn.ReflectionPad2d(3),
nn.Conv2d(input_nc, 64, 7),
nn.InstanceNorm2d(64),
nn.ReLU(inplace=True) ]
# Downsampling
in_features = 64
out_features = in_features*2
for _ in range(2):
model += [ nn.Conv2d(in_features, out_features, 3, stride=2, padding=1),
nn.InstanceNorm2d(out_features),
nn.ReLU(inplace=True) ]
in_features = out_features
out_features = in_features*2
# Residual blocks
for _ in range(n_residual_blocks):
model += [ResidualBlock(in_features)]
# Upsampling
out_features = in_features//2
for _ in range(2):
model += [ nn.ConvTranspose2d(in_features, out_features, 3, stride=2, padding=1, output_padding=1),
nn.InstanceNorm2d(out_features),
nn.ReLU(inplace=True) ]
in_features = out_features
out_features = in_features//2
# Output layer
model += [ nn.ReflectionPad2d(3),
nn.Conv2d(64, output_nc, 7),
nn.Tanh() ]
self.model = nn.Sequential(*model)
def forward(self, x):
return self.model(x)
class Classifier(nn.Module):
def __init__(self, input_nc):
super(Classifier, self).__init__()
self.classifier = nn.Sequential(
# batch_size x input_nc x 256 x 256
nn.Conv2d(input_nc, 32, kernel_size=5, stride=2, padding=2),
nn.ReLU(True),
# batch_size x 32 x 128 x 128
nn.MaxPool2d(kernel_size=2, stride=2, padding=0),
# batch_size x 32 x 64 x 64
nn.Conv2d(32, 64, kernel_size=5, stride=2, padding=2),
nn.ReLU(True),
# batch_size x 64 x 32 x 32
nn.MaxPool2d(kernel_size=2, stride=2, padding=0),
# batch_size x 64 x 16 x 16
nn.Conv2d(64, 128, kernel_size=5, stride=2, padding=2),
nn.ReLU(True),
# batch_size x 128 x 8 x 8
nn.MaxPool2d(kernel_size=2, stride=2, padding=0),
# batch_size x 128 x 4 x 4
nn.Linear(2048, 512),
nn.ReLU(True),
# batch_size x 512
nn.Linear(512, 128),
nn.ReLU(True),
# batch_size x 128
nn.Linear(128, 3)
)
def forward(self, inputs):
out = self.classifier(inputs)
return out
class Discriminator(nn.Module):
def __init__(self, input_nc):
super(Discriminator, self).__init__()
# A bunch of convolutions one after another
model = [ nn.Conv2d(input_nc, 64, 4, stride=2, padding=1),
nn.LeakyReLU(0.2, inplace=True) ]
model += [ nn.Conv2d(64, 128, 4, stride=2, padding=1),
nn.InstanceNorm2d(128),
nn.LeakyReLU(0.2, inplace=True) ]
model += [ nn.Conv2d(128, 256, 4, stride=2, padding=1),
nn.InstanceNorm2d(256),
nn.LeakyReLU(0.2, inplace=True) ]
model += [ nn.Conv2d(256, 512, 4, padding=1),
nn.InstanceNorm2d(512),
nn.LeakyReLU(0.2, inplace=True) ]
# FCN classification layer
model += [nn.Conv2d(512, 1, 4, padding=1)]
self.model = nn.Sequential(*model)
def forward(self, x):
x = self.model(x)
# Average pooling and flatten
return F.avg_pool2d(x, x.size()[2:]).view(x.size()[0], -1)