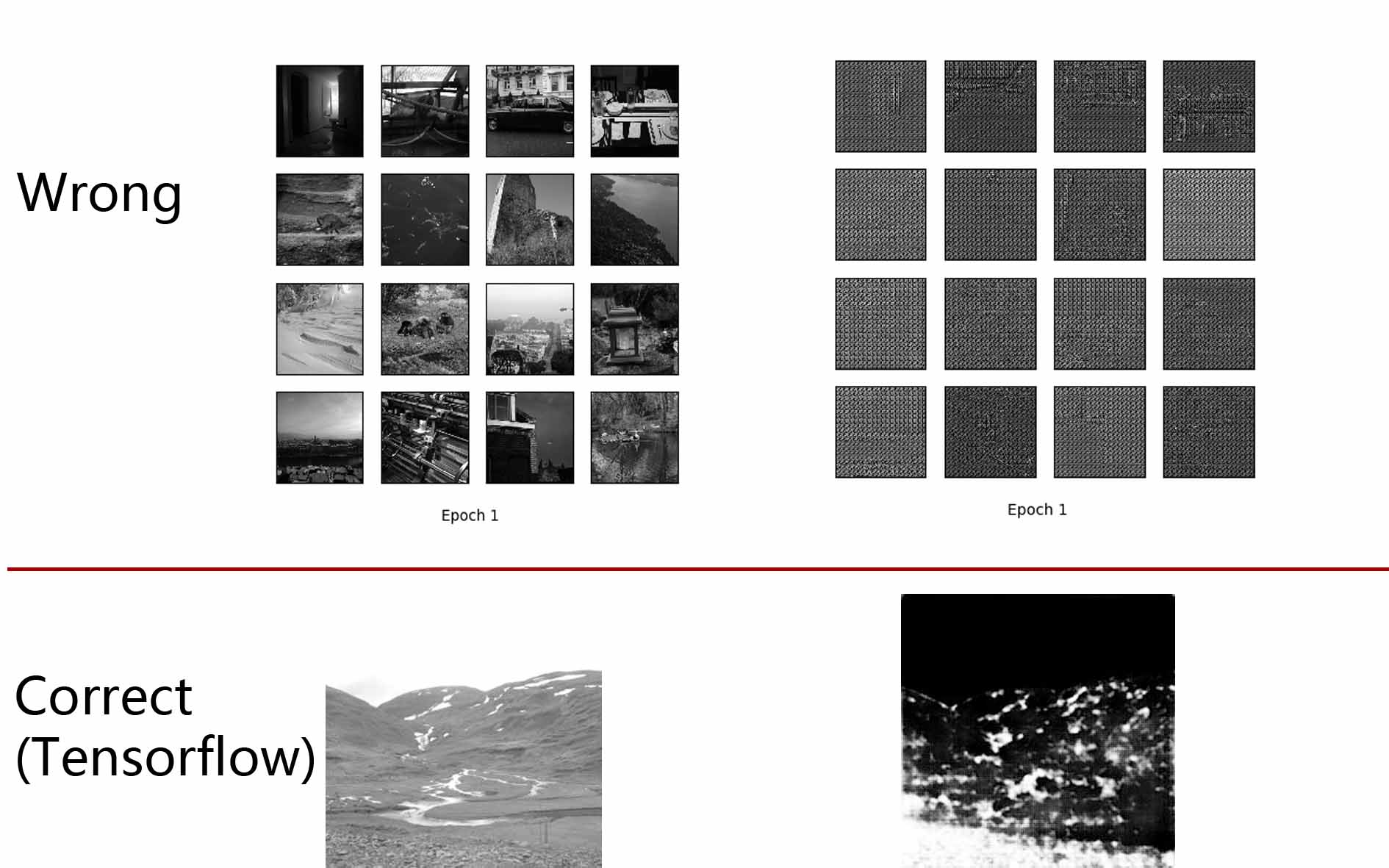
Just as the result shows, they consists of grain noises.
This is a task of generating “probability map” using a GAN with a U-Net style generator. In a sense, This task can be explained as using the U-Net structured generator of GAN to generate segmentation results.
Actually, the output is right when I run the tensorflow version that posted by the author of the paper: [An Embedding Cost Learning Framework Using GAN | IEEE Journals & Magazine | IEEE Xplore](An Embedding Cost Learning Framework Using GAN. And here is his tensorflow code on github:https://github.com/JianhuaYang001/spatial-image-steganography
The upper column are the inputs and my incorrect outputs; And the lower column are the inputs and its corresponding output(correct) by running the tensorflow code:
Here is the U-net based generator:
class Generator_Unet(nn.Module):
def __init__(self, input_nc=1, out_nc=1):
super(Generator_Unet, self).__init__()
self.input_nc = input_nc
self.out_nc = out_nc
self.inc = Down(self.input_nc, 16, inc=True)
self.down1 = Down(16, 32)
self.down2 = Down(32, 64)
self.down3 = Down(64, 128)
self.down4 = Down(128, 128)
self.down5 = Down(128, 128)
self.down6 = Down(128, 128)
self.down7 = Down(128, 128)
self.up1 = Up(128, 256, self.bil, dropout=True)
self.up2 = Up(256, 256, self.bil, dropout=True)
self.up3 = Up(256, 256, self.bil, dropout=True)
self.up4 = Up(256, 256, self.bil)
self.up5 = Up(256, 128, self.bil)
self.up6 = Up(128, 64, self.bil)
self.up7 = Up(64, 32, self.bil)
self.outc = OutConv(32, self.out_nc)
def forward(self, input):
x1 = self.inc(input)#(B, 16, 128, 128)
x2 = self.down1(x1)#(B, 32, 64, 64)
x3 = self.down2(x2)#(B, 64, 32, 32)
x4 = self.down3(x3)#(B, 128, 16, 16)
x5 = self.down4(x4)#(B, 128, 8, 8)
x6 = self.down5(x5)#(B, 128, 4, 4)
x7 = self.down6(x6)#(B, 128, 2, 2)
x8 = self.down7(x7)#(B, 128, 1, 1)
x = self.up1(x8, x7)#(B, 256, 2, 2)
x = self.up2(x, x6)#(B, 256, 4, 4)
x = self.up3(x, x5)#(B, 256, 8, 8)
x = self.up4(x, x4)#(B, 256, 16, 16)
x = self.up5(x, x3)#(B, 128, 32, 32)
x = self.up6(x, x2)#(B, 64, 64, 64)
x = self.up7(x, x1)#(B, 32, 128, 128)
prob = self.outc(x)#(B, 1, 256, 256)
return prob
Here is the modules of it:
class LRelu(nn.Module):
def __init__(self, alpha=0.2):
super(LRelu, self).__init__()
self.alpha=alpha
def forward(self, input):
output = F.relu_(input) - self.alpha*F.relu_(-input)
return output
class DownConv(nn.Module):
def __init__(self, in_channels, out_channels, mid_channels=None, kernel_size=3, relu=False, lrelu=False):
super(DownConv, self).__init__()
if not mid_channels:
mid_channels = out_channels
ker_size = kernel_size
if relu:
self.down_conv = nn.Sequential(
nn.ReLU(inplace=True),
nn.Conv2d(in_channels, mid_channels, ker_size, stride=2, padding=1),
nn.BatchNorm2d(mid_channels),
)
elif lrelu:
self.down_conv = nn.Sequential(
LRelu(),
nn.Conv2d(in_channels, mid_channels, ker_size, stride=2, padding=1),
nn.BatchNorm2d(mid_channels),
)
else:
self.down_conv = nn.Sequential(
nn.Conv2d(in_channels, mid_channels, ker_size, stride=2, padding=1),
nn.BatchNorm2d(mid_channels),
)
def forward(self, x):
return self.down_conv(x)
class Down(nn.Module):
def __init__(self, in_channels, out_channels, lrelu=True, inc=False):
super(Down, self).__init__()
if inc:
self.conv_block = nn.Sequential(
DownConv(in_channels, out_channels, lrelu=False, relu=False),
)
elif lrelu:
self.conv_block = nn.Sequential(
DownConv(in_channels, out_channels, lrelu=True),
)
else:
self.conv_block = nn.Sequential(
DownConv(in_channels, out_channels, relu=True),
)
def forward(self, x):
return self.conv_block(x)
class Up(nn.Module):
def __init__(self, in_channels, out_channels, bilinear=True, dropout=False):
super(Up, self).__init__()
self.up = nn.Sequential(
nn.ReLU(inplace=True),
nn.ConvTranspose2d(in_channels , out_channels//2, kernel_size=4, stride=2, padding=1, ),
)
self.dp_fg = dropout
self.bn = nn.BatchNorm2d(out_channels//2)
def forward(self, x1, x2):
x1 = self.up(x1)
x1 = self.bn(x1)
if self.dp_fg:
x1 = F.dropout(x1, p=0.5, training=True)
# input is CHW
diffY = x2.size()[2] - x1.size()[2]
diffX = x2.size()[3] - x1.size()[3]
x1 = F.pad(x1, [diffX // 2, diffX - diffX // 2,
diffY // 2, diffY - diffY // 2])
x = torch.cat([x1, x2], dim=1)
return x
Here is the main training file:
def weights_init(net):
for m in net.modules():
if isinstance(m, nn.Conv2d):
nn.init.normal_(m.weight.data, 0.0, 0.02)
elif isinstance(m, nn.ConvTranspose2d):
nn.init.normal_(m.weight.data, 0.0, 0.02)
elif isinstance(m, nn.BatchNorm2d):
nn.init.normal_(m.weight.data, 1.0, 0.02)
m.bias.data.zero_()
class ASGAN:
def __init__(self, device, img_nc=1, lr=0.0001, payld=0.4, bilinear=False):
self.device = device
self.img_nc = img_nc
self.lr = lr
self.payld = payld
self.bilinear = bilinear
self.netG = Generator_Unet(self.img_nc, bilinear=self.bilinear).to(device)
self.netDisc = Discriminator_steg(self.img_nc).to(device)
# initialize all weights
self.netG.apply(weights_init)
self.netDisc.apply(weights_init)
# initialize optimizers
self.optimizer_G = torch.optim.Adam(self.netG.parameters(), self.lr)
self.optimizer_D = torch.optim.Adam(self.netDisc.parameters(), self.lr)
def train_batch(self, cover, TANH_LAMBDA=60, D_LAMBDA=1, Payld_LAMBDA=1e-7):
# optimize D
for i in range(1):
prob_pred = self.netG(Variable(cover)).cuda()
data_noise = np.random.rand(prob_pred.shape[0], prob_pred.shape[1], prob_pred.shape[2], prob_pred.shape[3])
tensor_noise = torch.from_numpy(data_noise).float().to(self.device)
modi_map = 0.5*(torch.tanh((prob_pred+2.*tensor_noise-2)*TANH_LAMBDA) - torch.tanh((prob_pred-2.*tensor_noise)*TANH_LAMBDA))
stego = (cover*255 + modi_map)/255.
data = torch.stack((cover, stego)) ###detach
data_shape = list(data.size())
data = data.reshape(data_shape[0] * data_shape[1], *data_shape[2:])
data_group = data.cuda()
label_zeros = np.zeros(cover.shape[0])
label_ones = np.ones(cover.shape[0])
label = np.stack((label_zeros, label_ones))
label = torch.from_numpy(label).long()
label = Variable(label).cuda()
label_group = label.view(-1)
self.optimizer_D.zero_grad()
pred_D = self.netDisc(data_group.detach())
criterion = torch.nn.CrossEntropyLoss().cuda()
loss_D = criterion(pred_D, label_group)
loss_D.backward(retain_graph=True)
self.optimizer_D.step()
# optimize G
for i in range(1):
img_size = cover.shape[2]
batch_size = cover.shape[0]
self.optimizer_G.zero_grad()
prob_chanP = prob_pred / 2.0 + 1e-5
prob_chanM = prob_pred / 2.0 + 1e-5
prob_unchan = 1 - prob_pred + 1e-5
cap_entropy = torch.sum( (-prob_chanP * torch.log2(prob_chanP)
-prob_chanM * torch.log2(prob_chanM)
-prob_unchan * torch.log2(prob_unchan) ),
dim=(1,2,3)
)
payld_gen = torch.sum((cap_entropy), dim=0) / (img_size * img_size * batch_size)
cap = img_size * img_size * self.payld
loss_entropy = torch.mean(torch.pow(cap_entropy - cap, 2), dim=0)
loss_G = D_LAMBDA * (-loss_D) + Payld_LAMBDA * loss_entropy
loss_G.backward()
self.optimizer_G.step()
return loss_D.data[0], loss_G.data[0]
def train(self, train_dataloader, epochs):
data_iter = iter(train_dataloader)
sample_batch = data_iter.next()
data_fixed = sample_batch['img'][0:]
data_fixed = Variable(data_fixed.cuda())
noise_fixed = torch.randn((data_fixed.shape[0], data_fixed.shape[1], data_fixed.shape[2], data_fixed.shape[3]))
noise_fixed = Variable(noise_fixed.cuda())
for epoch in range(1, epochs+1):
loss_D_sum = 0
loss_G_sum = 0
for i, data in enumerate(train_dataloader, start=0):
images = data['img']
images = images.to(self.device)
loss_D_batch, loss_G_batch = self.train_batch(images)
loss_D_sum += loss_D_batch
loss_G_sum += loss_G_batch
# print statistics
num_batch = len(train_dataloader)
print("epoch %d:\nloss_D: %.6f, loss_G: %.6f" %
(epoch, loss_D_sum/num_batch, loss_G_sum/num_batch))
# save generator
if epoch%10==0:
netG_file_name = models_path + 'netG_epoch_' + str(epoch) + '.pth'
torch.save(self.netG.state_dict(), netG_file_name)
self.netG.eval()
modi_map_fixed = 0.5*(torch.tanh((self.netG(data_fixed)+2.*noise_fixed-2)*60) - torch.tanh((self.netG(data_fixed)-2.*noise_fixed)*60))
stego_fixed = (data_fixed*255 + modi_map_fixed)/255.
show_result(epoch, self.netG(data_fixed), save=True, path=img_prob_train_path+str(epoch)+'prob.png')
show_result(epoch, stego_fixed, save=True, path=img_prob_train_path+str(epoch)+'steg.png')
show_result(epoch, modi_map_fixed, save=True, path=img_prob_train_path+str(epoch)+'modi.png')
show_result(epoch, data_fixed, save=True, path=img_prob_train_path+str(epoch)+'cover.png')
self.netG.train()
I am so confusing since I debug for 2 days but still can not get the correct-style outputs.
Hope to get some selfless help, much appreciated!