Hello everyone,
I am new to computer vision and I am trying to implement ENet semantic segmentation for lane detection.
I currently have a working version of binary segmentation, achieving mIoU of ~77.
However, the provided TuSimple benchmark evaluation requires separate lanes to be identified.
Below is my dataloader,
class tuSimpleDataset(data.Dataset):
def __init__(self, file_path=root, size=[640,368], split='train', gray=True, intensity=0):
self.width = size[0]
self.height = size[1]
self.n_seg = 5 # total number of possible lanes (lanes <= 5)
self.size = size
if split == 'train':
self.file_path = train
elif split == 'test':
self.file_path = test
self.flags = {'size': size, 'gray': gray, 'split': split, 'intensity': intensity}
self.json_lists = glob.glob(os.path.join(self.file_path, '*.json'))
self.labels = []
for json_list in self.json_lists:
self.labels += [json.loads(line) for line in open(json_list)]
self.lanes = [label['lanes'] for label in self.labels]
self.y_samples = [label['h_samples'] for label in self.labels]
self.raw_files = [label['raw_file'] for label in self.labels]
self.img = np.zeros(size, np.uint8)
self.label_img = np.zeros(size,np.uint8)
self.ins_img = np.zeros((0, size[0], size[1]), np.uint8)
self.len = len(self.labels)
def preprocess(self):
# CLAHE normalization
img = cv2.cvtColor(self.img, cv2.COLOR_RGB2LAB)
img_plane = cv2.split(img)
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8,8))
img_plane[0] = clahe.apply(img_plane[0])
img = cv2.merge(img_plane)
self.img = cv2.cvtColor(img, cv2.COLOR_LAB2RGB)
def image_resize(self):
ins = []
self.img = cv2.resize(self.img, tuple(self.flags['size']), interpolation=cv2.INTER_CUBIC)
self.label_img = cv2.resize(self.label_img, tuple(self.flags['size']), interpolation=cv2.INTER_CUBIC)
for i in range(len(self.ins_img)):
dst = cv2.resize(self.ins_img[i], tuple(self.flags['size']), interpolation=cv2.INTER_CUBIC)
ins.append(dst)
self.ins_img = np.array(ins, dtype=np.uint8)
def get_lane_image(self, idx):
lane_pts = [[(x,y) for (x,y) in zip(lane, self.y_samples[idx]) if x >= 0] for lane in self.lanes[idx]]
while len(lane_pts) < self.n_seg:
lane_pts.append(list())
self.img = plt.imread(os.path.join(self.file_path, self.raw_files[idx]))
self.height, self.width, _ = self.img.shape
self.label_img = np.zeros((self.height, self.width), dtype=np.uint8)
self.ins_img = np.zeros((0, self.height, self.width), dtype=np.uint8)
for i, lane_pt in enumerate(lane_pts):
cv2.polylines(self.label_img, np.int32([lane_pt]), isClosed=False, color=(1), thickness=15)
gt = np.zeros((self.height, self.width), dtype=np.uint8)
gt = cv2.polylines(gt, np.int32([lane_pt]), isClosed=False, color=(1), thickness=7)
self.ins_img = np.concatenate([self.ins_img, gt[np.newaxis]])
def __getitem__(self, idx):
self.get_lane_image(idx)
self.image_resize()
self.preprocess()
if self.flags['split']=='train':
#self.random_transform() # disable random_transform
# Below changes shape from [368,640,3] to [3, 368, 640]
# self.img = np.array(np.transpose(self.img, (2,0,1)), dtype=np.float32)
self.label_img = np.array(self.label_img, dtype=np.float32)
self.ins_img = np.array(self.ins_img, dtype=np.float32)
return torch.Tensor(self.img), torch.LongTensor(self.label_img), torch.Tensor(self.ins_img)
else:
self.img = np.array(np.transpose(self.img, (2,0,1)), dtype=np.float32)
return torch.Tensor(self.img)
def __len__(self):
return self.len
In order to achieve distinguishable lanes as prediction output, am I right to say that I should increase the output channels of ENet from 2 to 6 (5 possible lanes + background)?
In get_lane_images(self,idx), the current code draws a polyline for each lane points.
My question is, how may I be able to provide an input image with their pixel values equal to their class value and if this is this the method I should use such that I may achieve my requirements?
i.e. in an example of a 7x7 image input,
[[ 0 5 0 0 0 0 0 ]
[ 0 5 0 0 0 3 0 ]
[ 0 0 0 0 0 3 0 ]
[ 0 1 0 0 0 3 0 ]
[ 0 1 0 2 0 0 4 ]
[ 0 1 0 2 0 0 4 ]
[ 1 0 0 2 0 0 4 ]]
the values of my image input of 368x640 would be the respective classes,
0 for background,
1 for lane 1,
2 for lane 2 and so on
The lanes do not have to be specific (i.e. class 1 does not have to be the leftmost lane, it could be any lane) and if only 3 lanes exist, class 4 and 5 would not be included in the input label pixel value. I am also wondering if this would affect my training and accuracy compared to a binary segmentation.

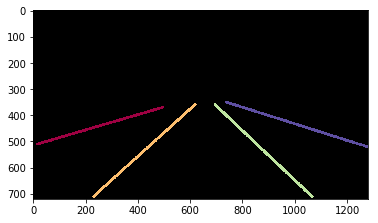
In the picture, the first 2 columns were my initial input (input image and binary label image). I hope to be able to identify different lanes in my output. The last column is empty since there are only 4 lanes in this input example.
The ENet model that I am currently using is below, I believe I would have to change some of it apart from just the output channels in order to have distinct lanes in the output like the image below?
"""Efficient Neural Network"""
import torch
import torch.nn as nn
import torch.nn.functional as F
from .segbase import SegBaseModel
from .model_zoo import MODEL_REGISTRY
from ..modules import _FCNHead
from ..config import cfg
__all__ = ['ENet']
@MODEL_REGISTRY.register()
class ENet(SegBaseModel):
"""Efficient Neural Network"""
def __init__(self, **kwargs):
super(ENet, self).__init__(need_backbone=False)
self.initial = InitialBlock(13, **kwargs)
self.bottleneck1_0 = Bottleneck(16, 16, 64, downsampling=True, **kwargs)
self.bottleneck1_1 = Bottleneck(64, 16, 64, **kwargs)
self.bottleneck1_2 = Bottleneck(64, 16, 64, **kwargs)
self.bottleneck1_3 = Bottleneck(64, 16, 64, **kwargs)
self.bottleneck1_4 = Bottleneck(64, 16, 64, **kwargs)
self.bottleneck2_0 = Bottleneck(64, 32, 128, downsampling=True, **kwargs)
self.bottleneck2_1 = Bottleneck(128, 32, 128, **kwargs)
self.bottleneck2_2 = Bottleneck(128, 32, 128, dilation=2, **kwargs)
self.bottleneck2_3 = Bottleneck(128, 32, 128, asymmetric=True, **kwargs)
self.bottleneck2_4 = Bottleneck(128, 32, 128, dilation=4, **kwargs)
self.bottleneck2_5 = Bottleneck(128, 32, 128, **kwargs)
self.bottleneck2_6 = Bottleneck(128, 32, 128, dilation=8, **kwargs)
self.bottleneck2_7 = Bottleneck(128, 32, 128, asymmetric=True, **kwargs)
self.bottleneck2_8 = Bottleneck(128, 32, 128, dilation=16, **kwargs)
self.bottleneck3_1 = Bottleneck(128, 32, 128, **kwargs)
self.bottleneck3_2 = Bottleneck(128, 32, 128, dilation=2, **kwargs)
self.bottleneck3_3 = Bottleneck(128, 32, 128, asymmetric=True, **kwargs)
self.bottleneck3_4 = Bottleneck(128, 32, 128, dilation=4, **kwargs)
self.bottleneck3_5 = Bottleneck(128, 32, 128, **kwargs)
self.bottleneck3_6 = Bottleneck(128, 32, 128, dilation=8, **kwargs)
self.bottleneck3_7 = Bottleneck(128, 32, 128, asymmetric=True, **kwargs)
self.bottleneck3_8 = Bottleneck(128, 32, 128, dilation=16, **kwargs)
self.bottleneck4_0 = UpsamplingBottleneck(128, 16, 64, **kwargs)
self.bottleneck4_1 = Bottleneck(64, 16, 64, **kwargs)
self.bottleneck4_2 = Bottleneck(64, 16, 64, **kwargs)
self.bottleneck5_0 = UpsamplingBottleneck(64, 4, 16, **kwargs)
self.bottleneck5_1 = Bottleneck(16, 4, 16, **kwargs)
self.fullconv = nn.ConvTranspose2d(16, self.nclass, 2, 2, bias=False)
self.__setattr__('decoder', ['bottleneck1_0', 'bottleneck1_1', 'bottleneck1_2', 'bottleneck1_3',
'bottleneck1_4', 'bottleneck2_0', 'bottleneck2_1', 'bottleneck2_2',
'bottleneck2_3', 'bottleneck2_4', 'bottleneck2_5', 'bottleneck2_6',
'bottleneck2_7', 'bottleneck2_8', 'bottleneck3_1', 'bottleneck3_2',
'bottleneck3_3', 'bottleneck3_4', 'bottleneck3_5', 'bottleneck3_6',
'bottleneck3_7', 'bottleneck3_8', 'bottleneck4_0', 'bottleneck4_1',
'bottleneck4_2', 'bottleneck5_0', 'bottleneck5_1', 'fullconv'])
def forward(self, x):
# init
x = self.initial(x)
# stage 1
x, max_indices1 = self.bottleneck1_0(x)
x = self.bottleneck1_1(x)
x = self.bottleneck1_2(x)
x = self.bottleneck1_3(x)
x = self.bottleneck1_4(x)
# stage 2
x, max_indices2 = self.bottleneck2_0(x)
x = self.bottleneck2_1(x)
x = self.bottleneck2_2(x)
x = self.bottleneck2_3(x)
x = self.bottleneck2_4(x)
x = self.bottleneck2_5(x)
x = self.bottleneck2_6(x)
x = self.bottleneck2_7(x)
x = self.bottleneck2_8(x)
# stage 3
x = self.bottleneck3_1(x)
x = self.bottleneck3_2(x)
x = self.bottleneck3_3(x)
x = self.bottleneck3_4(x)
x = self.bottleneck3_6(x)
x = self.bottleneck3_7(x)
x = self.bottleneck3_8(x)
# stage 4
x = self.bottleneck4_0(x, max_indices2)
x = self.bottleneck4_1(x)
x = self.bottleneck4_2(x)
# stage 5
x = self.bottleneck5_0(x, max_indices1)
x = self.bottleneck5_1(x)
# out
x = self.fullconv(x)
return x
class InitialBlock(nn.Module):
"""ENet initial block"""
def __init__(self, out_channels, norm_layer=nn.BatchNorm2d, **kwargs):
super(InitialBlock, self).__init__()
self.conv = nn.Conv2d(3, out_channels, 3, 2, 1, bias=False)
self.maxpool = nn.MaxPool2d(2, 2)
self.bn = norm_layer(out_channels + 3)
self.act = nn.PReLU()
def forward(self, x):
x_conv = self.conv(x)
x_pool = self.maxpool(x)
x = torch.cat([x_conv, x_pool], dim=1)
x = self.bn(x)
x = self.act(x)
return x
class Bottleneck(nn.Module):
"""Bottlenecks include regular, asymmetric, downsampling, dilated"""
def __init__(self, in_channels, inter_channels, out_channels, dilation=1, asymmetric=False,
downsampling=False, norm_layer=nn.BatchNorm2d, **kwargs):
super(Bottleneck, self).__init__()
self.downsamping = downsampling
if downsampling:
self.maxpool = nn.MaxPool2d(2, 2, return_indices=True)
self.conv_down = nn.Sequential(
nn.Conv2d(in_channels, out_channels, 1, bias=False),
norm_layer(out_channels)
)
self.conv1 = nn.Sequential(
nn.Conv2d(in_channels, inter_channels, 1, bias=False),
norm_layer(inter_channels),
nn.PReLU()
)
if downsampling:
self.conv2 = nn.Sequential(
nn.Conv2d(inter_channels, inter_channels, 2, stride=2, bias=False),
norm_layer(inter_channels),
nn.PReLU()
)
else:
if asymmetric:
self.conv2 = nn.Sequential(
nn.Conv2d(inter_channels, inter_channels, (5, 1), padding=(2, 0), bias=False),
nn.Conv2d(inter_channels, inter_channels, (1, 5), padding=(0, 2), bias=False),
norm_layer(inter_channels),
nn.PReLU()
)
else:
self.conv2 = nn.Sequential(
nn.Conv2d(inter_channels, inter_channels, 3, dilation=dilation, padding=dilation, bias=False),
norm_layer(inter_channels),
nn.PReLU()
)
self.conv3 = nn.Sequential(
nn.Conv2d(inter_channels, out_channels, 1, bias=False),
norm_layer(out_channels),
nn.Dropout2d(0.1)
)
self.act = nn.PReLU()
def forward(self, x):
identity = x
if self.downsamping:
identity, max_indices = self.maxpool(identity)
identity = self.conv_down(identity)
out = self.conv1(x)
out = self.conv2(out)
out = self.conv3(out)
out = self.act(out + identity)
if self.downsamping:
return out, max_indices
else:
return out
class UpsamplingBottleneck(nn.Module):
"""upsampling Block"""
def __init__(self, in_channels, inter_channels, out_channels, norm_layer=nn.BatchNorm2d, **kwargs):
super(UpsamplingBottleneck, self).__init__()
self.conv = nn.Sequential(
nn.Conv2d(in_channels, out_channels, 1, bias=False),
norm_layer(out_channels)
)
self.upsampling = nn.MaxUnpool2d(2)
self.block = nn.Sequential(
nn.Conv2d(in_channels, inter_channels, 1, bias=False),
norm_layer(inter_channels),
nn.PReLU(),
nn.ConvTranspose2d(inter_channels, inter_channels, 2, 2, bias=False),
norm_layer(inter_channels),
nn.PReLU(),
nn.Conv2d(inter_channels, out_channels, 1, bias=False),
norm_layer(out_channels),
nn.Dropout2d(0.1)
)
self.act = nn.PReLU()
def forward(self, x, max_indices):
out_up = self.conv(x)
out_up = self.upsampling(out_up, max_indices)
out_ext = self.block(x)
out = self.act(out_up + out_ext)
return out
I hope that I am not too confusing, and I apologise for the multiple edits. Thank you all.