Hi,
I’ve been playing around with bits and pieces of nn code, trying to understand how to build neural nets from scratch. (Gone through the fast ai course; now really trying to understand torch and building from ground up)
There’s a really great channel on Youtube, that’s making a neural net library from scratch, and I’m trying to port over the example set up into torch, but I’m stumbling a bit.
The idea is to take 2 of the mnist digits and a using a set of linear layers encode the images using sigmoid activations. End result would be so you can interpolate between the two images.
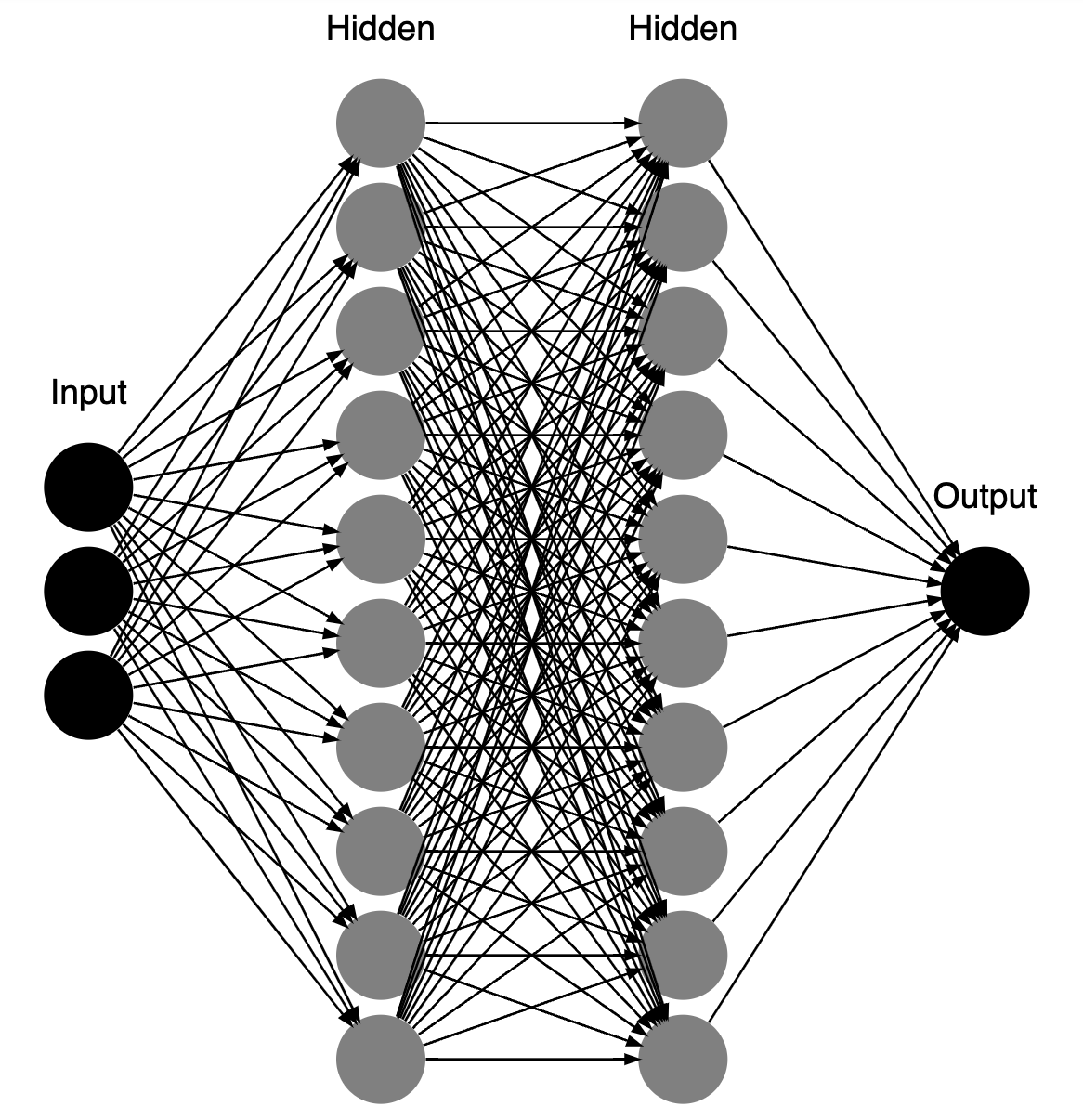
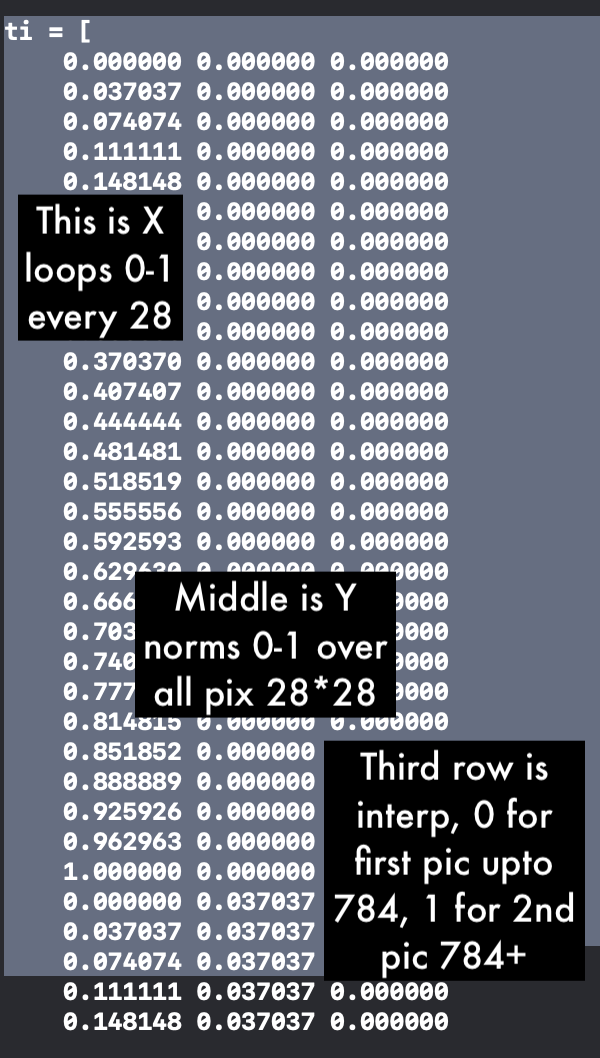
In the example he has on the yt channel, he uses three neurons in the first layer, 1st for X, 2nd for Y, and 3rd Neuron is the interpolator. The images are given markers 0 and 1, and the third neuron during inference controls the interpolation, so 0 = image 1, and 1 = image 2; 0.5 being a midway between shapes.
This is where I’ve got stuck trying to figure out, as using Torch we’re not encoding x and y into separate neurons. And i’m not entirely sure how I’d add this interpolation neuron
Has anyone got any idea or points in the right direction? And it seems like it works, but I don’t really get it, as during inference I just pass in the same data it was trained with. Or is that what an autoencoder is, same data in, same data out?
If anyone has literally any insights I’d be really greatful, as even this simple set up is kinda confusing to me.
This is my code so far:
from torch import nn
from torch.optim import Adam
from torchvision import datasets
from torchvision.transforms import ToTensor
import torch.nn.functional as F
import torch
from PIL import Image
from torchvision.transforms import ToPILImage
train = datasets.MNIST(root='data', download=True, train=True, transform=ToTensor())
im1 = train[0][0]
im2 = train[1][0]
img1 = ToPILImage()(im1)
img2 = ToPILImage()(im2)
img1.show()
img2.show()
totens = ToTensor()
img1tensor = totens(img1)
class NeuralNetwork(nn.Module):
def __init__(self):
super().__init__()
self.flatten = nn.Flatten()
self.linear_relu_stack = nn.Sequential(
nn.Linear(28*28, 10),
nn.Sigmoid(),
# nn.ReLU(),
nn.Linear(10, 20),
nn.Sigmoid(),
# nn.ReLU(),
nn.Linear(20, 20),
nn.Sigmoid(),
# nn.ReLU(),
nn.Linear(20, 28*28),
)
def forward(self, x):
x = self.flatten(x)
logits = self.linear_relu_stack(x)
return logits
# random_data = torch.rand((1, 1, 28, 28))
data = img1tensor
model = NeuralNetwork()
result = model(data) # run data through model to see if it works just passing through
print(result.shape)
result = result.reshape(28,28)
img = ToPILImage()(result)
img.show()
model = NeuralNetwork().to('cpu') # change to cuda if you want
print(model)
optimizer = Adam(model.parameters(), lr = 1e-1)
loss_func = nn.MSELoss()
loss = 0
for epoch in range(100):
optimizer.zero_grad() # reset the gradients back to zero
# compute reconstructions
outputs = model(data)
# print(outputs.shape, data.shape)
# compute training reconstruction loss
train_loss = loss_func(outputs, data.reshape(1,784))
# compute accumulated gradients
train_loss.backward()
# perform parameter update based on current gradients
optimizer.step()
# add the mini-batch training loss to epoch loss
loss += train_loss.item()
print(train_loss)
result = model(data) # run data through model to see if it works just passing through
result = result.reshape(28,28)
img = ToPILImage()(result)
img.show()
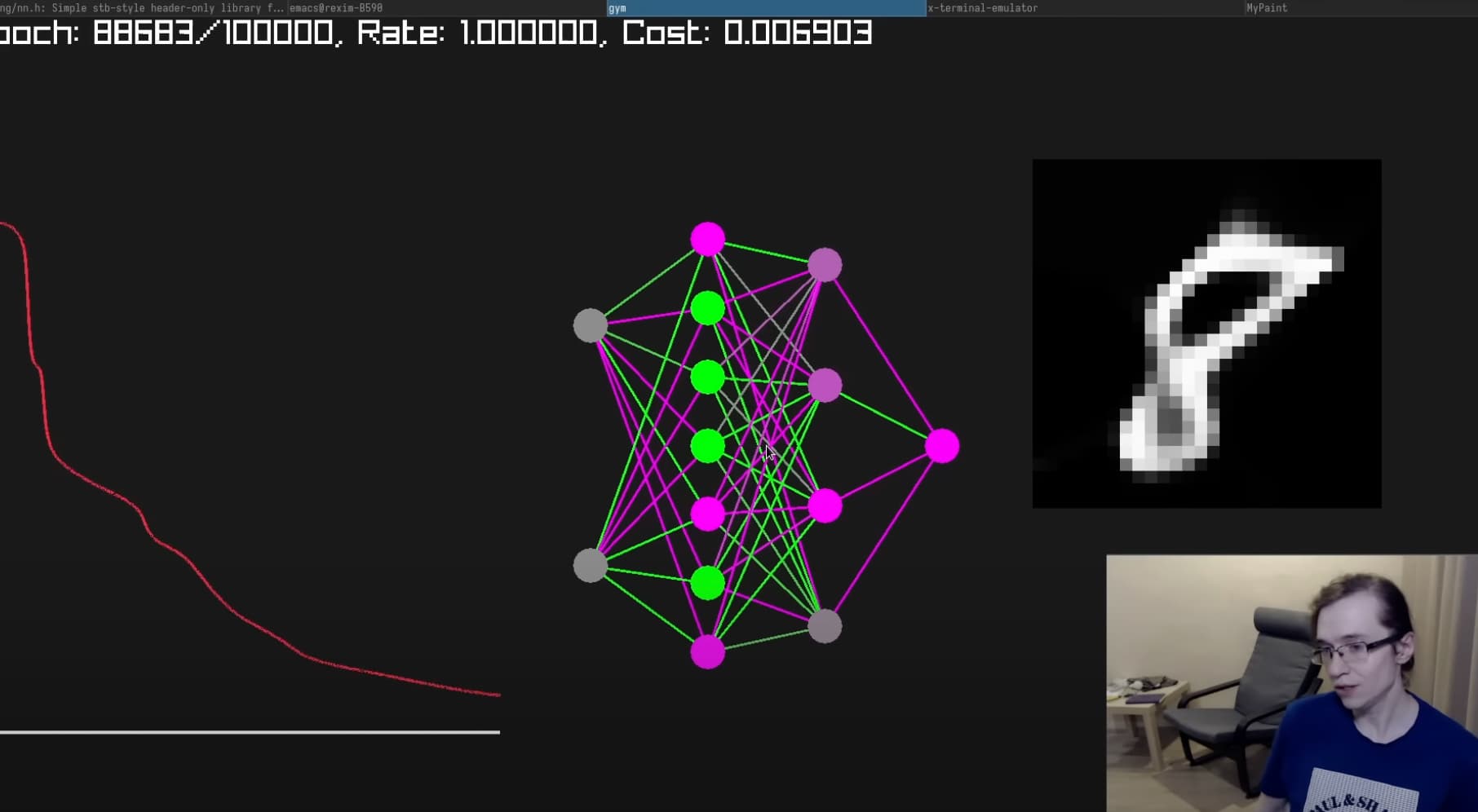
And this is the video I’m trying to port from : tsoding daily - nn from scratch