I am a relative newcomer to DL, and as such, I don’t have a clear grasp of what information is necessary and what isn’t when requesting help from an online community of programmers. So I apologize in advance for the wall of text you’re about to witness!
For my masters thesis, I’m replicating a paper that uses a UNet to analyze satellite imagery and generate maps showing forest cover in a particular region. The authors used the VGG11 pre-trained model, but this is not the pre-trained model that I have questions about.
Link to the paper, in case anyone’s interested!
Every image from the Landsat-8 satellite has several “bands”, and each one corresponds to a very specific range of wavelengths on the electromagnetic spectrum. There are 4 different configurations for the input data being fed to the model, based on the number of “bands” in the satellite image (18, 11, 7, or 3).
Simply put, “bands” in this context = “input channels” in the context of a neural network.
The authors compare the performance of their novel UNet model with traditional ML classifiers for each input configuration (18 bands, 11 bands, etc.) and conclude that an image consisting of 18 bands provides the best overall performance. Presumably, they saved the best performing UNet model for each configuration as a “.pt” file.
However, in the GitHub README, they’ve only provided the pre-trained UNet model as a “.pt” file for the 18 band input data.
Since I’m replicating their paper, I am also having to test the UNet’s performance on all 4 input configurations. However, since they only provided the 18 band pre-trained model, I cannot test the performance of the other 3 configurations. If I do try to feed an 11 band input to the UNet while using the 18 band pre-trained model as a checkpoint, I get the following error:
Traceback (most recent call last):
File "train.py", line 84, in <module>
main(config)
File "train.py", line 55, in main
trainer = Trainer(model, criterion, metrics, optimizer,
File "/scratch/sjayaramannaga/AI-ForestWatch-Srinath/trainer/trainer.py",
line 22, in __init__
super().__init__(model, criterion, metric_ftns, optimizer, config)
File "/scratch/sjayaramannaga/AI-ForestWatch-Srinath/base/base_trainer.py",
line 51, in __init__
self._resume_checkpoint(cfg_trainer['pretrained_model'])
File "/scratch/sjayaramannaga/AI-ForestWatch-Srinath/base/base_trainer.py",
line 141, in _resume_checkpoint
self.model.load_state_dict(torch.load(resume_path), strict=False)
File "/home/sjayaramannaga/.local/lib/python3.8/site-packages/torch/nn/modules/
module.py", line 1482, in load_state_dict
raise RuntimeError('Error(s) in loading state_dict for {}:\n\t{}'
.format(RuntimeError: Error(s) in loading state_dict for UNet:
size mismatch for encoder_1.conv1.weight: copying a param with shape
torch.Size([64, 18, 3, 3]) from checkpoint, the shape in current model
is torch.Size([64, 11, 3, 3]).
When I reached out to one of the authors he suggested that I “load the pretrained weights in the model with 18 channels, change the input dimension of the first layer, and retrain the model”.
How do I do what he suggested? I tried loading the pre-trained model in a Jupyter Notebook using torch.load() and then I printed it. The “.pt” file itself contains only the weights used by the UNet, and nothing more. It is just an Ordered Dict that contains a number of tensor arrays, as shown in the screenshot below:
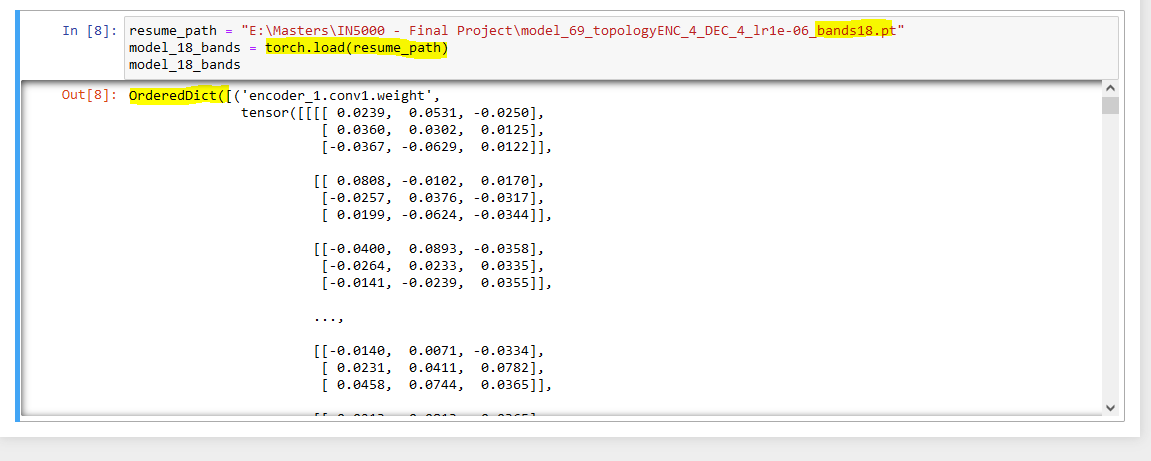
From what I have understood so far, if I have to re-train this 18 band UNet, I have to change encoder_1.conv1 to be (11, 64, conv_1=nn.Conv2d(11, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))).
But I have no idea how to do that with the “.pt” file they’ve provided.
I have provided the code for the model below.
"""
UNet model definition in here
"""
import torch
import torch.nn as nn
from base import BaseModel
from torch.optim import *
from torchvision import models
class UNet_down_block(BaseModel):
"""
Encoder class
"""
def __init__(self, input_channel, output_channel, conv_1=None, conv_2=None):
super(UNet_down_block, self).__init__()
if conv_1:
print('LOG: Using pretrained convolutional layer', conv_1)
if conv_2:
print('LOG: Using pretrained convolutional layer', conv_2)
self.input_channels = input_channel
self.output_channels = output_channel
self.conv1 = conv_1 if conv_1 else nn.Conv2d(input_channel,
output_channel, kernel_size=3, padding=1)
self.conv2 = conv_2 if conv_2 else nn.Conv2d(output_channel,
output_channel, kernel_size=3, padding=1)
self.bn1 = nn.BatchNorm2d(num_features=output_channel)
self.bn2 = nn.BatchNorm2d(num_features=output_channel)
self.activate = nn.ReLU()
def forward(self, x):
x = self.activate(self.bn1(self.conv1(x)))
x = self.activate(self.bn2(self.conv2(x)))
return x
class UNet_up_block(BaseModel):
"""
Decoder class
"""
def __init__(self, prev_channel, input_channel, output_channel):
super(UNet_up_block, self).__init__()
self.output_channels = output_channel
self.tr_conv_1 = nn.ConvTranspose2d(input_channel, input_channel,
kernel_size=2, stride=2)
self.conv_1 = nn.Conv2d(prev_channel+input_channel, output_channel,
kernel_size=3, stride=1, padding=1)
self.conv_2 = nn.Conv2d(output_channel, output_channel, kernel_size=3,
stride=1, padding=1)
self.bn1 = nn.BatchNorm2d(num_features=output_channel)
self.bn2 = nn.BatchNorm2d(num_features=output_channel)
self.activate = nn.ReLU()
def forward(self, prev_feature_map, x):
x = self.tr_conv_1(x)
x = self.activate(x)
x = torch.cat((x, prev_feature_map), dim=1)
x = self.activate(self.bn1(self.conv_1(x)))
x = self.activate(self.bn2(self.conv_2(x)))
return x
class UNet(BaseModel):
def __init__(self, topology, input_channels, num_classes):
super(UNet, self).__init__()
# these topologies are possible right now
self.topologies = {
"ENC_1_DEC_1": self.ENC_1_DEC_1,
"ENC_2_DEC_2": self.ENC_2_DEC_2,
"ENC_3_DEC_3": self.ENC_3_DEC_3,
"ENC_4_DEC_4": self.ENC_4_DEC_4,
}
assert topology in self.topologies
vgg_trained = models.vgg11(pretrained=True)
pretrained_layers = list(vgg_trained.features)
self.max_pool = nn.MaxPool2d(2, 2)
self.dropout = nn.Dropout2d(0.6)
self.activate = nn.ReLU()
self.encoder_1 = UNet_down_block(input_channels, 64)
self.encoder_2 = UNet_down_block(64, 128, conv_1=pretrained_layers[3])
self.encoder_3 = UNet_down_block(128, 256, conv_1=pretrained_layers[6],
conv_2=pretrained_layers[8])
self.encoder_4 = UNet_down_block(256, 512, conv_1=pretrained_layers[11],
conv_2 = pre_trained_layers[13])
self.mid_conv_64_64_a = nn.Conv2d(64, 64, 3, padding=1)
self.mid_conv_64_64_b = nn.Conv2d(64, 64, 3, padding=1)
self.mid_conv_128_128_a = nn.Conv2d(128, 128, 3, padding=1)
self.mid_conv_128_128_b = nn.Conv2d(128, 128, 3, padding=1)
self.mid_conv_256_256_a = nn.Conv2d(256, 256, 3, padding=1)
self.mid_conv_256_256_b = nn.Conv2d(256, 256, 3, padding=1)
self.mid_conv_512_1024 = nn.Conv2d(512, 1024, 3, padding=1)
self.mid_conv_1024_1024 = nn.Conv2d(1024, 1024, 3, padding=1)
self.decoder_4 = UNet_up_block(prev_channel=self.encoder_4.output_channels,
input_channel=self.mid_conv_1024_1024.out_channels, output_channel=256)
self.decoder_3 = UNet_up_block(prev_channel=self.encoder_3.output_channels,
input_channel=self.decoder_4.output_channels, output_channel=128)
self.decoder_2 = UNet_up_block(prev_channel=self.encoder_2.output_channels,
input_channel=self.decoder_3.output_channels, output_channel=64)
self.decoder_1 = UNet_up_block(prev_channel=self.encoder_1.output_channels,
input_channel=self.decoder_2.output_channels, output_channel=64)
self.binary_last_conv = nn.Conv2d(64, num_classes, kernel_size=1)
self.softmax = nn.Softmax(dim=1)
self.forward = self.topologies[topology]
def ENC_1_DEC_1(self, x_in):
x1_cat = self.encoder_1(x_in)
x1_cat_1 = self.dropout(x1_cat)
x1 = self.max_pool(x1_cat_1)
x_mid = self.mid_conv_64_64_a(x1)
x_mid = self.activate(x_mid)
x_mid = self.mid_conv_64_64_b(x_mid)
x_mid = self.activate(x_mid)
x_mid = self.dropout(x_mid)
x = self.decoder_1(x1_cat, x_mid)
x = self.binary_last_conv(x)
# return the final vector and the corresponding softmax-ed prediction
return x, self.softmax(x)
def ENC_2_DEC_2(self, x_in):
x1_cat = self.encoder_1(x_in)
x1 = self.max_pool(x1_cat)
x2_cat = self.encoder_2(x1)
x2_cat_1 = self.dropout(x2_cat)
x2 = self.max_pool(x2_cat_1)
x_mid = self.mid_conv_128_128_a(x2)
x_mid = self.activate(x_mid)
x_mid = self.mid_conv_128_128_b(x_mid)
x_mid = self.activate(x_mid)
x_mid = self.dropout(x_mid)
x = self.decoder_2(x2_cat, x_mid)
x = self.decoder_1(x1_cat, x)
x = self.binary_last_conv(x)
# return the final vector and the corresponding softmax-ed prediction
return x, self.softmax(x)
def ENC_3_DEC_3(self, x_in):
x1_cat = self.encoder_1(x_in)
x1 = self.max_pool(x1_cat)
x2_cat = self.encoder_2(x1)
x2_cat_1 = self.dropout(x2_cat)
x2 = self.max_pool(x2_cat_1)
x3_cat = self.encoder_3(x2)
x3 = self.max_pool(x3_cat)
x_mid = self.mid_conv_256_256_a(x3)
x_mid = self.activate(x_mid)
x_mid = self.mid_conv_256_256_b(x_mid)
x_mid = self.activate(x_mid)
x_mid = self.dropout(x_mid)
x = self.decoder_3(x3_cat, x_mid)
x = self.decoder_2(x2_cat, x)
x = self.decoder_1(x1_cat, x)
x = self.binary_last_conv(x)
# return the final vector and the corresponding softmax-ed prediction
return x, self.softmax(x)
def ENC_4_DEC_4(self, x_in):
x1_cat = self.encoder_1(x_in)
x1 = self.max_pool(x1_cat)
x2_cat = self.encoder_2(x1)
x2_cat_1 = self.dropout(x2_cat)
x2 = self.max_pool(x2_cat_1)
x3_cat = self.encoder_3(x2)
x3 = self.max_pool(x3_cat)
x4_cat = self.encoder_4(x3)
x4_cat_1 = self.dropout(x4_cat)
x4 = self.max_pool(x4_cat_1)
x_mid = self.mid_conv_512_1024(x4)
x_mid = self.activate(x_mid)
x_mid = self.mid_conv_1024_1024(x_mid)
x_mid = self.activate(x_mid)
x_mid = self.dropout(x_mid)
x = self.decoder_4(x4_cat, x_mid)
x = self.decoder_3(x3_cat, x)
x = self.decoder_2(x2_cat, x)
x = self.decoder_1(x1_cat, x)
x = self.binary_last_conv(x)
# return the final vector and the corresponding softmax-ed prediction
return x, self.softmax(x)