Dear All,
I created a minimal example here to reproduce the problem I am facing.
I have a data set with 21 features (e.g covariates) and 108405 rows, e.g.:
torch.Size([108405, 21])
I am interested in using a CNN, for this problem and I have the following NN architecture:
Net2 (
(l1): Sequential (
(0): Linear (21 -> 126)
(1): Dropout (p = 0.15)
(2): LeakyReLU (0.1)
(3): BatchNorm1d(126, eps=1e-05, momentum=0.1, affine=True)
)
(c1): Sequential (
(0): Conv1d(21, 126, kernel_size=(3,), stride=(1,), padding=(1,))
(1): Dropout (p = 0.25)
(2): LeakyReLU (0.1)
(3): BatchNorm1d(126, eps=1e-05, momentum=0.1, affine=True)
)
(out): Sequential (
(0): Linear (756 -> 1)
)
(sig): Sigmoid ()
)
Now, I would like to eliminate the first Linear (21 -> 126) layer:
The only reason it is there is because I was unable to correctly shape my input to feed directly into the CNN that follows, e.g.:
Is this possible? How can I reshape my x_tensor so that I t can be fed directly into the Conv1d layer?
This is the full network:
# References:
# https://github.com/vinhkhuc/PyTorch-Mini-Tutorials/blob/master/5_convolutional_net.py
# https://gist.github.com/spro/c87cc706625b8a54e604fb1024106556
X_tensor_train= XnumpyToTensor(trainX) # default order is NBC for a 3d tensor, but we have a 2d tensor
X_shape=X_tensor_train.data.size()
# Dimensions
# Number of features for the input layer
N_FEATURES=trainX.shape[1]
# Number of rows
NUM_ROWS_TRAINNING=trainX.shape[0]
# this number has no meaning except for being divisable by 2
N_MULT_FACTOR=6 # min should be 4
# Size of first linear layer
N_HIDDEN=N_FEATURES * N_MULT_FACTOR
# CNN kernel size
N_CNN_KERNEL=3
DEBUG_ON=True
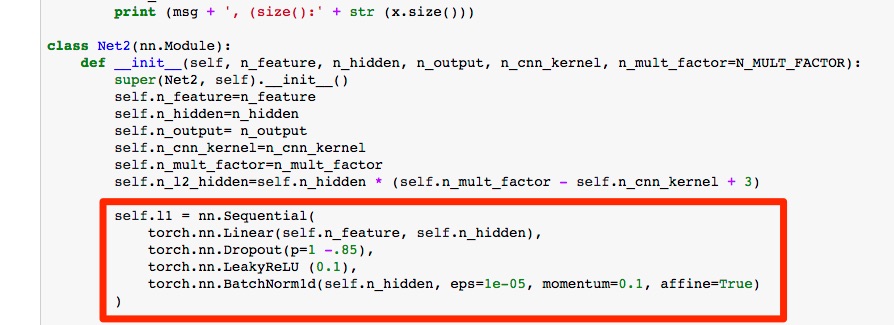
def debug(msg, x):
if DEBUG_ON:
print (msg + ', (size():' + str (x.size()))
class Net2(nn.Module):
def __init__(self, n_feature, n_hidden, n_output, n_cnn_kernel, n_mult_factor=N_MULT_FACTOR):
super(Net2, self).__init__()
self.n_feature=n_feature
self.n_hidden=n_hidden
self.n_output= n_output
self.n_cnn_kernel=n_cnn_kernel
self.n_mult_factor=n_mult_factor
self.n_l2_hidden=self.n_hidden * (self.n_mult_factor - self.n_cnn_kernel + 3)
self.l1 = nn.Sequential(
torch.nn.Linear(self.n_feature, self.n_hidden),
torch.nn.Dropout(p=1 -.85),
torch.nn.LeakyReLU (0.1),
torch.nn.BatchNorm1d(self.n_hidden, eps=1e-05, momentum=0.1, affine=True)
)
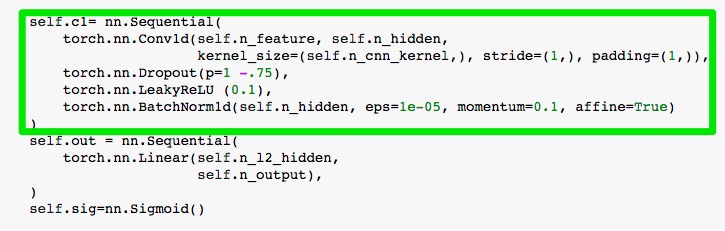
self.c1= nn.Sequential(
torch.nn.Conv1d(self.n_feature, self.n_hidden,
kernel_size=(self.n_cnn_kernel,), stride=(1,), padding=(1,)),
torch.nn.Dropout(p=1 -.75),
torch.nn.LeakyReLU (0.1),
torch.nn.BatchNorm1d(self.n_hidden, eps=1e-05, momentum=0.1, affine=True)
)
self.out = nn.Sequential(
torch.nn.Linear(self.n_l2_hidden,
self.n_output),
)
self.sig=nn.Sigmoid()
def forward(self, x):
debug('raw',x)
varSize=x.data.shape[0] # must be calculated here in forward() since its is a dynamic size
x=self.l1(x)
debug('after lin',x)
# for CNN
x = x.view(varSize,self.n_feature,self.n_mult_factor)
debug('after view',x)
x=self.c1(x)
debug('after CNN',x)
# for Linear layer
x = x.view(varSize, self.n_hidden * (self.n_mult_factor -self.n_cnn_kernel + 3))
debug('after 2nd view',x)
# x=self.l2(x)
x=self.out(x)
debug('after self.out',x)
x=self.sig(x)
return x
net = Net2(n_feature=N_FEATURES, n_hidden=N_HIDDEN, n_output=1, n_cnn_kernel=N_CNN_KERNEL)
if use_cuda:
net=net.cuda()
lgr.info(net)
b = net(X_tensor_train)
print ('(b.size():' + str (b.size()))
Output:
(108405, 21)
<type 'numpy.ndarray'>
<class 'torch.cuda.FloatTensor'>
torch.Size([108405, 21])
raw, (size():torch.Size([108405, 21])
after lin, (size():torch.Size([108405, 126])
after view, (size():torch.Size([108405, 21, 6])
after CNN, (size():torch.Size([108405, 126, 6])
after 2nd view, (size():torch.Size([108405, 756])
after self.out, (size():torch.Size([108405, 1])
(b.size():torch.Size([108405, 1])
Many thanks,