Hy guys I want to create a model like this:
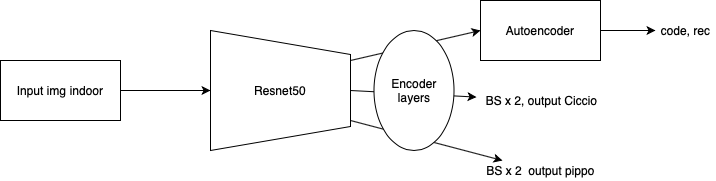
I need to know if I made mistakes. Because I am not convinced of the code:
import torch.nn as nn
from torchvision.models.utils import load_state_dict_from_url
import math
# ResNet###### BLOCCHI #####################################
def conv3x3(in_planes, out_planes, stride=1):
"""convoluzione 3x3 con padding di 1"""
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,padding=1, bias=False)
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * 4, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes * 4)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
###############################################################
#################ENCODER CON RESNET###########################
###############################################################
class Encoder(nn.Module):
def __init__(self, block, layers):
self.inplanes = 64
super(Encoder, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1) # , return_indices = True)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
self.avgpool = nn.AvgPool2d(7, stride=1)
self.fc = nn.Linear(512 * block.expansion, 1000)
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion,kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
def create_encoder(pretrained = False):
model = Encoder(Bottleneck, [3, 4, 6, 3]) #Con questi parametri è una resnet50
if pretrained:
state_dict = load_state_dict_from_url('https://download.pytorch.org/models/resnext50_32x4d-7cdf4587.pth') #URL verificato
model.load_state_dict(state_dict)
######Aggiungo layer di encoder come suggerito
model.fc = nn.Sequential(
nn.Linear(2048, 1024),
nn.ReLU(),
nn.Linear(1024, 512),
nn.ReLU(),
nn.Linear(512, 256),
nn.ReLU(),
nn.Linear(256, 128),
nn.ReLU(),
nn.Linear(128, 64),
nn.ReLU())
return model
encoder = create_encoder(True)
################USCITA ENCODER = 7x7x64
class AutoEncoder(nn.Module):
def __init__(self,):
super(AutoEncoder, self).__init__()
self.encoder = encoder
self.decoder = nn.Sequential(
nn.ConvTranspose2d(64, 64, 3),
nn.ConvTranspose2d(64, 64, 3),
nn.ReLU(),
nn.ConvTranspose2d(64, 128, 3),
nn.ConvTranspose2d(128, 128, 3),
nn.ReLU(),
nn.ConvTranspose2d(128, 256, 3),
nn.ConvTranspose2d(256, 256, 3),
nn.ReLU(),
nn.ConvTranspose2d(256, 512, 3),
nn.ConvTranspose2d(512, 512, 3),
nn.ReLU(),
nn.ConvTranspose2d(512, 1024, 3),
nn.ConvTranspose2d(1024, 3, 3))
def forward(self,x):
code = self.encoder(x)
reconstructed = self.decoder(code)
return code, reconstructed
class Ciccio(nn.Module):
def __init__(self):
super(Ciccio, self)
self.encoder = encoder
self.ciccio = nn.Sequential(nn.Linear(64, 2), nn.Relu())
def forward(self,x):
code = self.encoder(x)
ciccio = self.ciccio(code)
return ciccio
class Pippo(nn.Module):
def __init__(self):
super(Pippo, self)
self.encoder = encoder
self.pippo = nn.Sequential(nn.Linear(64, 2), nn.Relu())
def forward(self, x):
code = self.encoder(x)
pippo = self.pippo(code)
return pippo
class final_model(nn.Module):
def __init__(self):
self.AutoEncoder = AutoEncoder()
self.Ciccio = Ciccio()
self.Pippo = Pippo()
def forward(self, x):
code , rec = self.AutoEncoder(x)
Ciccio = self.Ciccio(x)
Pippo = self.Pippo(x)
#control dimension in runtime
return code, rec, Ciccio, Pippo
I edit the code of Resnet because in future I think to modify it entirely.
Sorry for my bad English ![]()
