Hi, I need help to convert CNN-LSTM model code from Keras to Pytorch.
Function of this Code
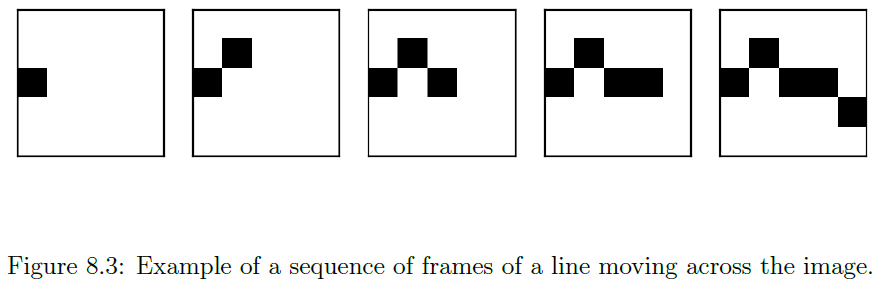
This CNN-LSTM model is used to solve moving squre video prediction problems (shown in Figure). The input is image frames. image size is (50, 50). The output is class prediction (left or right).
I want to use pytorch to reproduce this model, because i need this CNN-LSTM architecture to solve similar problem.
Here are the original model:
from random import random
from random import randint
from numpy import array
from numpy import zeros
from keras import Sequential
from matplotlib import pyplot
from keras.layers import Conv2D, MaxPooling2D, LSTM, Dense, Flatten, TimeDistributed
from keras.callbacks import TensorBoard
import tensorflow as tf
import datetime
import keras
# generate the next frame in the sequence
def next_frame(last_step, last_frame, column):
# define the scope of the next step
lower = max(0, last_step - 1)
upper = min(last_frame.shape[0] - 1, last_step + 1)
# choose the row index for the next step
step = randint(lower, upper)
# copy the prior frame
frame = last_frame.copy()
# add the new step
frame[step, column] = 1
return frame, step
# generate a sequence of frame of a dot moving across an image
def build_frames(size):
frames = list()
# create the first frame
frame = zeros((size, size))
step = randint(0, size - 1)
# decide if we are heading left or right
right = 1 if random() < 0.5 else 0
col = 0 if right else size - 1
frame[step, col] = 1
frames.append(frame)
# create all remaining frames
for i in range(1, size):
col = i if right else size - 1 - i
frame, step = next_frame(step, frame, col)
frames.append(frame)
return frames, right
# generate multiple swquences of frames and reshape for network input
def generate_examples(size, n_patterns):
X, y = list(), list()
for _ in range(n_patterns):
frames, right = build_frames(size)
X.append(frames)
y.append(right)
# resize as [samples, timesteps, width, height, channels]
X = array(X).reshape(n_patterns, size, size, size, 1)
y = array(y).reshape(n_patterns, 1)
return X, y
# generate sequence of frames
size = 6
frames, right = build_frames(size)
# plot all frames
pyplot.figure()
for i in range(size):
# create a grayscale subplot for each frame
pyplot.subplot(1, size, i + 1)
pyplot.imshow(frames[i], cmap='Greys')
# turn of the scale to make it clearer
ax = pyplot.gca()
ax.get_xaxis().set_visible(False)
ax.get_yaxis().set_visible(False)
# show the plot
pyplot.show()
# configure problem
size = 50
# define the model
model = Sequential()
model.add(TimeDistributed(Conv2D(2, (2, 2), activation='relu'),
input_shape=(None, size, size, 1)))
model.add(TimeDistributed(MaxPooling2D(pool_size=(2, 2))))
model.add(TimeDistributed(Flatten()))
model.add(LSTM(50))
model.add(Dense(1, activation='sigmoid'))
model.compile(loss='binary_crossentropy', optimizer='adam', metrics=['acc'])
print(model.summary())
log_dir = "logs/fit/" + datetime.datetime.now().strftime("%Y%m%d-%H%M%S")
tensorboard_callback = keras.callbacks.TensorBoard(log_dir=log_dir, histogram_freq=1)
# fit model
X, y = generate_examples(size, 5000)
model.fit(X, y, batch_size=32, epochs=1, callbacks=[tensorboard_callback])
# evaluate model
X, y = generate_examples(size, 100)
loss, acc = model.evaluate(X, y, verbose=0)
print("loss: %f, acc: %f" % (loss, acc * 100))
# prediction on new data
X, y = generate_examples(size, 1)
yhat = model.predict_classes(X, verbose=0)
expected = "Right" if y[0] == 1 else "Left"
predicted = "Right" if yhat[0] == 1 else "Left"
print("Expected: %s, Predicted: %s" % (expected, predicted))
And this is my Pytorch model, and I am not sure am I doing right or not as I am new in Pytorch. And my model did not work. ![]() Any comment would appreciate.
Any comment would appreciate.
class TimeDistributed(nn.Module):
def __init__(self, module, batch_first=True):
# def __init__(self, module, batch_first=False):
super(TimeDistributed, self).__init__()
self.module = module
self.batch_first = batch_first
def forward(self, x):
if len(x.size()) <= 2:
return self.module(x)
# Squash samples and timesteps into a single axis
x_reshape = x.contiguous().view(-1, x.size(-1)) # (samples * timesteps, input_size)
y = self.module(x_reshape)
# We have to reshape Y
if self.batch_first:
y = y.contiguous().view(x.size(0), -1, y.size(-1)) # (samples, timesteps, output_size)
else:
y = y.view(-1, x.size(1), y.size(-1)) # (timesteps, samples, output_size)
return y
class CNN_LSTM(nn.Module):
def __init__(self):
super(CNN_LSTM, self).__init__()
self.conv = nn.Conv2d(1, 2, (2, 2))
self.relu = TimeDistributed(nn.ReLU())
self.pool = TimeDistributed(nn.MaxPool2d(2, 2))
self.flatten = TimeDistributed(nn.Flatten())
self.lstm = nn.LSTM(1, 50)
self.dense = nn.Linear(50, 1) # equivalent to Dense in keras
self.sigmoid = nn.Sigmoid()
def forward(self, x):
x = self.relu(self.conv(x))
x = self.pool(x)
x = self.flatten(x)
x = self.lstm(x)
x = self.dense(x)
x = self.sigmoid(x)
return x
Besides the Timedistributed module i used comes from here
why i need this Timedistributed module?
Because i do not know how to build a CNN-LSTM Architecture in pytorch. I only know in keras CNN-LSTM can be achieved by wrapping the entire CNN input model (one layer or more) in a TimeDistributed layer.