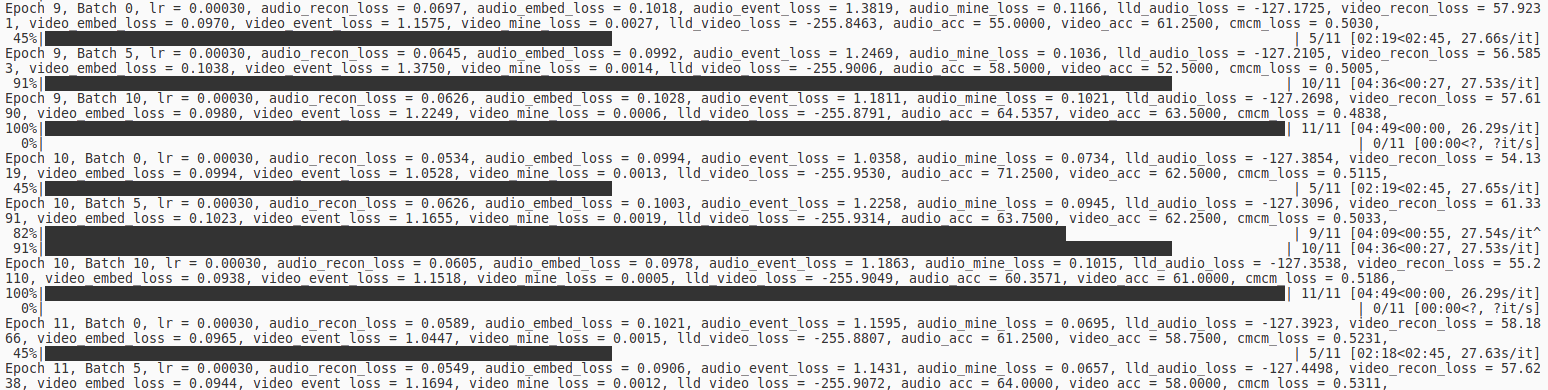
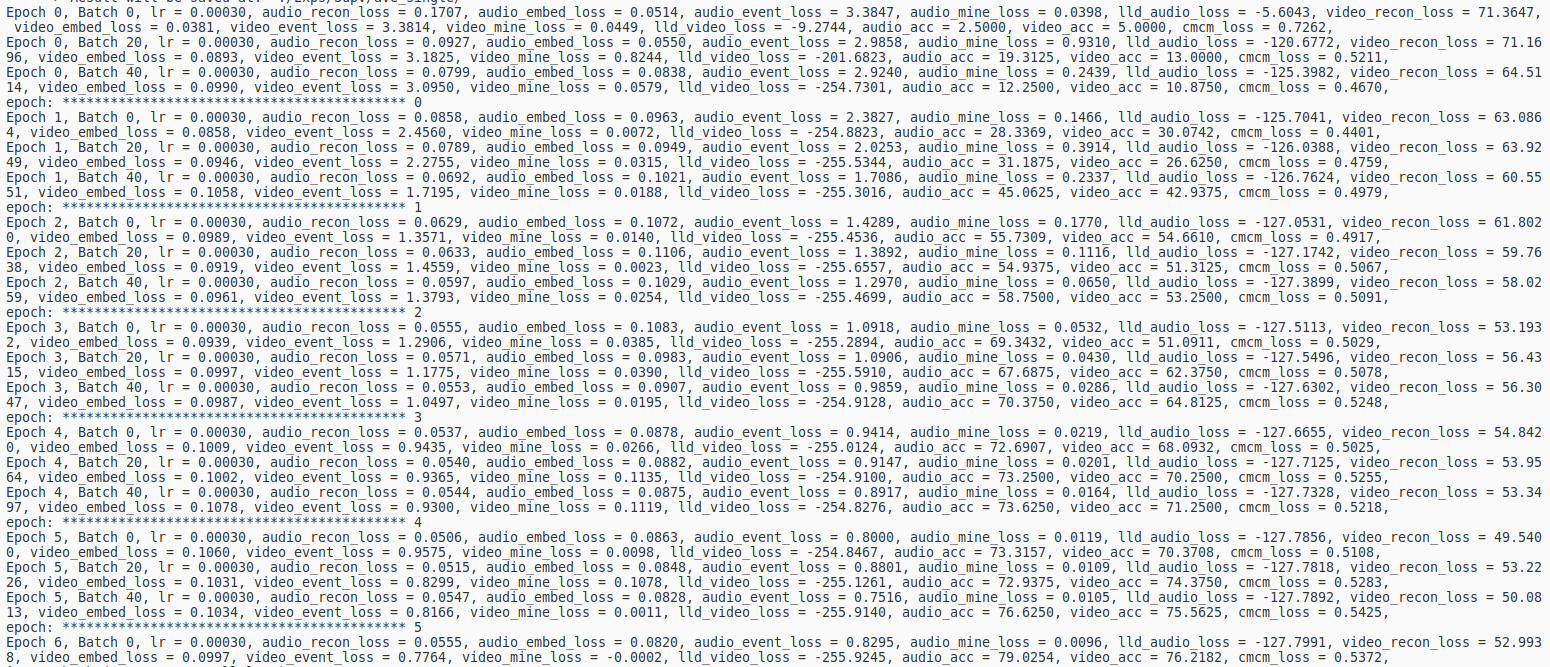
Specifically, the DDP of 3 GPUs needs 15 epochs to reach the accuracy of 5 epochs for a single GPU. It feels like the information calculated by multiple cards is not shared.
sampler.set_epoch(epoch) has settings and should not be related to my problem.
But my model involves a buffer called embedding, which is equivalent to codebook, which is updated with ema. I suspected it might be different for multicard embeddings, but I tried to use reduce_ All (), which has not improved the results.
It is worth mentioning that my model consists of four main parts, Encoder, Decoder, a_ Mi, b_ Mi. Where a_ MI and b_ Mi helps to increase mutual information between modes. I tried to put these four parts into one model for DDP, and the result is no different from setting DDP for each of the four parts.
Has anyone encountered a similar problem? I have seen a lot of similar issues in the forum and have not found a solution yet.
My English is poor, please forgive me. If you need more information, you could tell me.
Here is part of my code:
import ...
# ================================= seed config ============================
SEED = 43
random.seed(SEED)
np.random.seed(seed=SEED)
torch.manual_seed(seed=SEED)
torch.cuda.manual_seed(seed=SEED)
torch.backends.cudnn.deterministic = True
torch.backends.cudnn.benchmark = False
# =============================================================================
def init_distributed_mode():
if'RANK'in os.environ and'WORLD_SIZE'in os.environ:
args.rank = int(os.environ["RANK"])
args.world_size = int(os.environ['WORLD_SIZE'])
args.gpu = int(os.environ['LOCAL_RANK'])
elif'SLURM_PROCID'in os.environ:
args.rank = int(os.environ['SLURM_PROCID'])
args.gpu = args.rank % torch.cuda.device_count()
else:
print('Not using distributed mode')
args.distributed = False
return
args.distributed = True
torch.cuda.set_device(args.gpu)
args.dist_backend = 'nccl'
dist.init_process_group(backend='nccl', init_method=args.dist_url, world_size=args.world_size, rank=args.rank)
dist.barrier()
def main():
# utils variable
global args, logger, writer, dataset_configs
# statistics variable
global best_accuracy, best_accuracy_epoch
best_accuracy, best_accuracy_epoch = 0, 0
# configs
dataset_configs = get_and_save_args(parser)
parser.set_defaults(**dataset_configs)
args = parser.parse_args()
# select GPUs
# os.environ['CUDA_DEVICE_ORDER'] = "PCI_BUS_ID"
# os.environ['CUDA_VISIBLE_DEVICES'] = '0,1,2,3'
init_distributed_mode()
rank = args.rank
device = torch.device(args.device)
checkpoint_path=""
'''dataset selection and dataloader'''
if args.dataset_name == 'ave':
data_root = '../AVE-ECCV18-master/data'
train_data_set = AVEDataset(data_root, split='train')
val_data_set = AVEDataset(data_root, split='val')
train_sampler=torch.utils.data.distributed.DistributedSampler(train_data_set)
val_sampler=torch.utils.data.distributed.DistributedSampler(val_data_set)
# train_batch_sampler=torch.utils.data.BatchSampler(train_sampler,args.batch_size,drop_last=True)
train_dataloader = DataLoader(
train_data_set,
# DDP
# batch_sampler=train_batch_sampler,
shuffle=False,
sampler=train_sampler,
batch_size=args.batch_size,
num_workers=8,
pin_memory=True
)
val_dataloader = DataLoader(
val_data_set,
# DDP
batch_size=args.batch_size,
sampler=val_sampler,
shuffle=False,
num_workers=8,
pin_memory=True
)
else:
raise NotImplementedError
'''model setting'''
Encoder = ...
Video_mi_net = ...
Audio_mi_net = ...
Decoder = ...
'''optimizer setting'''
Encoder.to(device)
Video_mi_net.to(device)
Audio_mi_net.to(device)
Decoder.to(device)
Encoder = nn.parallel.DistributedDataParallel(Encoder, device_ids=[args.gpu])
Video_mi_net = nn.parallel.DistributedDataParallel(Video_mi_net, device_ids=[args.gpu])
Audio_mi_net = nn.parallel.DistributedDataParallel(Audio_mi_net, device_ids=[args.gpu])
Decoder = nn.parallel.DistributedDataParallel(Decoder, device_ids=[args.gpu])
optimizer = torch.optim.Adam(chain(Encoder.module.parameters(), Decoder.module.parameters()), lr=args.lr)
optimizer_video_mi_net = torch.optim.Adam(Video_mi_net.module.parameters(), lr=args.mi_lr)
optimizer_audio_mi_net = torch.optim.Adam(Audio_mi_net.module.parameters(), lr=args.mi_lr)
scheduler = MultiStepLR(optimizer, milestones=[10, 20, 30], gamma=0.5)
'''loss'''
criterion = nn.BCEWithLogitsLoss().cuda()
criterion_event = nn.CrossEntropyLoss().cuda()
'''Tensorboard and Code backup'''
writer = SummaryWriter(args.snapshot_pref)
recorder = Recorder(args.snapshot_pref, ignore_folder="Exps/")
recorder.writeopt(args)
'''Training and Evaluation'''
total_step = 0
for epoch in range(args.n_epoch):
train_dataloader.sampler.set_epoch(epoch)
loss, total_step = train_epoch(device, Encoder.module, Video_mi_net.module, Audio_mi_net.module, Decoder.module, train_dataloader, criterion, criterion_event,
optimizer, optimizer_video_mi_net, optimizer_audio_mi_net, epoch, total_step,True)
scheduler.step()
dist.destroy_process_group()
def _export_log(epoch, total_step, batch_idx, lr, loss_meter):
msg = 'Epoch {}, Batch {}, lr = {:.5f}, '.format(epoch, batch_idx, lr)
for k, v in loss_meter.items():
msg += '{} = {:.4f}, '.format(k, v)
# msg += '{:.3f} seconds/batch'.format(time_meter)
print(msg)
sys.stdout.flush()
loss_meter.update({"batch": total_step})
def to_eval(all_models):
for m in all_models:
m.eval()
def to_train(all_models):
for m in all_models:
m.train()
def train_epoch(device, Encoder, Video_mi_net, Audio_mi_net, Decoder, train_dataloader, criterion, criterion_event, optimizer, optimizer_video_mi_net, optimizer_audio_mi_net, epoch, total_step,is_train=True):
batch_time = AverageMeter()
data_time = AverageMeter()
losses = AverageMeter()
train_acc = AverageMeter()
end_time = time.time()
models = [Encoder, Video_mi_net, Audio_mi_net, Decoder]
to_train(models)
Encoder.double()
Video_mi_net.double()
Audio_mi_net.double()
Decoder.double()
Encoder.to(device)
Video_mi_net.to(device)
Audio_mi_net.to(device)
Decoder.to(device)
optimizer.zero_grad()
mi_iters = 5
if dist.get_rank() == 0:
train_dataloader = tqdm(train_dataloader)
last_n_iter = 0
for n_iter, batch_data in enumerate(train_dataloader):
last_n_iter = n_iter
data_time.update(time.time() - end_time)
'''Feed input to model'''
visual_feature, audio_feature, labels = batch_data
visual_feature.to(device)
audio_feature.to(device)
labels = labels.double().to(device)
labels_foreground = labels[:, :, :-1]
labels_BCE, labels_evn = labels_foreground.max(-1)
labels_event, _ = labels_evn.max(-1)
for i in range(mi_iters):
optimizer_video_mi_net, lld_video_loss, optimizer_audio_mi_net, lld_audio_loss = \
mi_first_forward(audio_feature, visual_feature, Encoder, Video_mi_net, Audio_mi_net, optimizer_video_mi_net, optimizer_audio_mi_net, is_train)
audio_embedding_loss, video_embedding_loss, mi_audio_loss, mi_video_loss, audio_recon_loss, video_recon_loss, \
audio_class, video_class, cmcm_loss = mi_second_forward(audio_feature, visual_feature, Encoder, Video_mi_net, Audio_mi_net, Decoder, is_train)
audio_event_loss = criterion_event(audio_class, labels_event.to(device))
video_event_loss = criterion_event(video_class, labels_event.to(device))
audio_acc = compute_accuracy_supervised(audio_class, labels)
video_acc = compute_accuracy_supervised(video_class, labels)
loss_items = {
"audio_recon_loss":audio_recon_loss.item(),
"audio_embed_loss":audio_embedding_loss.item(),
"audio_event_loss":audio_event_loss.item(),
"audio_mine_loss":mi_audio_loss.item(),
"lld_audio_loss": lld_audio_loss.item(),
"video_recon_loss":video_recon_loss.item(),
"video_embed_loss":video_embedding_loss.item(),
"video_event_loss":video_event_loss.item(),
"video_mine_loss":mi_video_loss.item(),
"lld_video_loss": lld_video_loss.item(),
"audio_acc": audio_acc.item(),
"video_acc": video_acc.item(),
"cmcm_loss": cmcm_loss.item()
}
#loss_items = {}
metricsContainer.update("loss", loss_items)
loss = audio_recon_loss + video_recon_loss + audio_embedding_loss \
+ video_embedding_loss + mi_audio_loss + mi_video_loss + audio_event_loss + video_event_loss + cmcm_loss
if n_iter % 20 == 0:
_export_log(epoch=epoch, loss_meter=metricsContainer.calculate_average("loss"))
loss.backward()
'''Clip Gradient'''
if args.clip_gradient is not None:
for model in models:
total_norm = clip_grad_norm_(model.parameters(), args.clip_gradient)
'''Update parameters'''
optimizer.step()
optimizer.zero_grad()
losses.update(loss.item(), visual_feature.size(0) * 10)
batch_time.update(time.time() - end_time)
end_time = time.time()
if device != torch.device("cpu"):
torch.cuda.synchronize(device)
return losses.avg, last_n_iter + total_step
def mi_first_forward(audio_feature, visual_feature, Encoder, Video_mi_net, Audio_mi_net, optimizer_video_mi_net, optimizer_audio_mi_net,is_train):
optimizer_video_mi_net.zero_grad()
optimizer_audio_mi_net.zero_grad()
_, video_club_feature, audio_encoder_result, \
video_vq, audio_vq, _, _, _ = Encoder(audio_feature, visual_feature, is_train)
video_club_feature = video_club_feature.detach()
audio_encoder_result = audio_encoder_result.detach()
video_vq = video_vq.detach()
audio_vq = audio_vq.detach()
lld_video_loss = -Video_mi_net.loglikeli(video_vq, video_club_feature)
if is_train:
lld_video_loss.backward()
optimizer_video_mi_net.step()
lld_audio_loss = -Audio_mi_net.loglikeli(audio_vq, audio_encoder_result)
if is_train:
lld_audio_loss.backward()
optimizer_audio_mi_net.step()
return optimizer_video_mi_net, lld_video_loss, optimizer_audio_mi_net, lld_audio_loss
def mi_second_forward(audio_feature, visual_feature, Encoder, Video_mi_net, Audio_mi_net, Decoder, is_train):
video_encoder_result, video_club_feature, audio_encoder_result, \
video_vq, audio_vq, audio_embedding_loss, video_embedding_loss, cmcm_loss = Encoder(audio_feature, visual_feature, is_train)
mi_video_loss = Video_mi_net.mi_est(video_vq, video_club_feature)
mi_audio_loss = Audio_mi_net.mi_est(audio_vq, audio_encoder_result)
video_recon_loss, audio_recon_loss, video_class, audio_class \
= Decoder(visual_feature, audio_feature, video_encoder_result, audio_encoder_result, video_vq, audio_vq)
return audio_embedding_loss, video_embedding_loss, mi_audio_loss, mi_video_loss, \
audio_recon_loss, video_recon_loss, audio_class, video_class, cmcm_loss
if __name__ == '__main__':
main()
about lr, I have try:
- single GPU’s lr
- single GPU’s lr * multiGPU’num, like lr * 3
- lr * sqer(3)
It seems like no.1 is better
single machine, multi processes