Hi,
How can I get the mean, variance, gamma and beta for batchnorm from a saved CNN model?
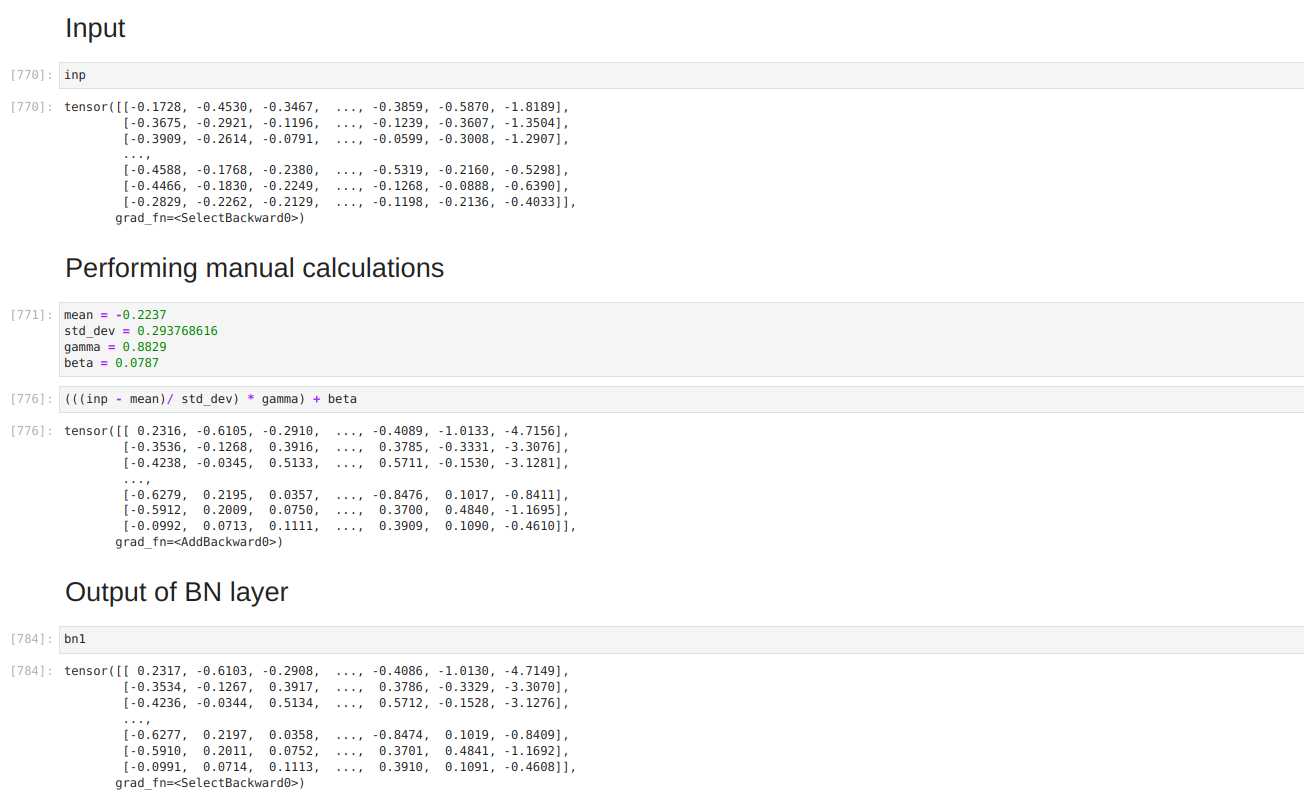
Also, how can I use them for inference?
This is my architecture:
----------------------------------------------------------------
Layer (type) Output Shape Param #
================================================================
Conv2d-1 [-1, 32, 32, 32] 896
BatchNorm2d-2 [-1, 32, 32, 32] 64
ReLU-3 [-1, 32, 32, 32] 0
Dropout-4 [-1, 32, 32, 32] 0
Conv2d-5 [-1, 64, 32, 32] 18,496
BatchNorm2d-6 [-1, 64, 32, 32] 128
ReLU-7 [-1, 64, 32, 32] 0
AvgPool2d-8 [-1, 64, 16, 16] 0
Conv2d-9 [-1, 128, 16, 16] 73,856
BatchNorm2d-10 [-1, 128, 16, 16] 256
ReLU-11 [-1, 128, 16, 16] 0
Dropout-12 [-1, 128, 16, 16] 0
Conv2d-13 [-1, 128, 16, 16] 147,584
BatchNorm2d-14 [-1, 128, 16, 16] 256
ReLU-15 [-1, 128, 16, 16] 0
AvgPool2d-16 [-1, 128, 8, 8] 0
Conv2d-17 [-1, 256, 8, 8] 295,168
BatchNorm2d-18 [-1, 256, 8, 8] 512
ReLU-19 [-1, 256, 8, 8] 0
Dropout-20 [-1, 256, 8, 8] 0
Conv2d-21 [-1, 256, 8, 8] 590,080
BatchNorm2d-22 [-1, 256, 8, 8] 512
ReLU-23 [-1, 256, 8, 8] 0
AvgPool2d-24 [-1, 256, 4, 4] 0
Flatten-25 [-1, 4096] 0
Linear-26 [-1, 32] 131,104
ReLU-27 [-1, 32] 0
Linear-28 [-1, 10] 330
================================================================
Total params: 1,259,242
Trainable params: 1,259,242
Non-trainable params: 0
----------------------------------------------------------------
Input size (MB): 0.01
Forward/backward pass size (MB): 5.38
Params size (MB): 4.80
Estimated Total Size (MB): 10.19
----------------------------------------------------------------