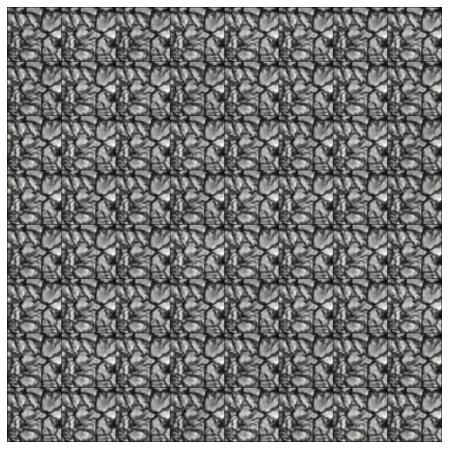
Hello, I have managed to generate a DCGAN for 128x128 images, however when I try to apply it to images with a size of 256x256, the network seems to fail and it generates 64 low quality.
I would like to know what is happening with my network or what am I doing wrong, I attach my code and the results
# direccion del directorio de entrenamiento
dataroot = "/content/dataset"
# Number of workers for dataloader
workers = 2
# Batch size during training
batch_size = 1
# Spatial size of training images. All images will be resized to this
# size using a transformer.
image_size = 256
# Number of channels in the training images. For color images this is 3
nc = 3
# Size of z latent vector (i.e. size of generator input)
nz = 100
# Size of feature maps in generator
ngf = 16
# Size of feature maps in discriminator
ndf = 16
# Number of training epochs
num_epochs = 50
# Learning rate for optimizers
lr = 0.0002
# Beta1 hyperparam for Adam optimizers
beta1 = 0.5
# Number of GPUs available. Use 0 for CPU mode.
ngpu = 1
print("Dataset done")
#Creacion del bloque de entramieto
#Configuracion del lote de entrenamiento
dataset = torchvision.datasets.ImageFolder(root=dataroot,
transform=transforms.Compose([
transforms.Resize(image_size),
transforms.CenterCrop(image_size),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)),]))
# creacion del un dataloader
dataloader = torch.utils.data.DataLoader(dataset, batch_size=batch_size,
shuffle=True, num_workers=workers)
# Decide which device we want to run on
device = torch.device("cuda:0" if (torch.cuda.is_available() and ngpu > 0) else "cpu")
# Plot some training images
real_batch = next(iter(dataloader))
plt.figure(figsize=(4,4))
plt.axis("off")
plt.title("Training Images")
plt.imshow(np.transpose(vutils.make_grid(real_batch[0].to(device)[:64], padding=2, normalize=True).cpu(),(1,2,0)))
dataset_size = len(dataloader.dataset)
dataset_size
638
# Generator Code
class Generator(nn.Module):
def __init__(self, ngpu):
super(Generator, self).__init__()
self.ngpu = ngpu
self.main = nn.Sequential(
# state size. (ngf*32) x 4 x 4
nn.ConvTranspose2d(nz, ngf * 32, 4, 1, 0, bias=False),
nn.BatchNorm2d(ngf * 32),
nn.ReLU(True),
# state size. (ngf*16) x 8 x 8
nn.ConvTranspose2d(ngf * 32, ngf * 16, 4, 2, 1, bias=False),
nn.BatchNorm2d(ngf * 16),
nn.ReLU(True),
# state size. (ngf*8) x 16 x 16
nn.ConvTranspose2d(ngf * 16, ngf * 8, 4, 2, 1, bias=False),
nn.BatchNorm2d(ngf * 8),
nn.ReLU(True),
# state size. (ngf*4) x 32 x 32
nn.ConvTranspose2d(ngf * 8, ngf * 4, 4, 2, 1, bias=False),
nn.BatchNorm2d(ngf * 4),
nn.ReLU(True),
# state size. (ngf*2) x 32 x 32
nn.ConvTranspose2d(ngf * 4, ngf * 2, 4, 2, 1, bias=False),
nn.BatchNorm2d(ngf * 2),
nn.ReLU(True),
# state size. (ngf*2) x 32 x 32
nn.ConvTranspose2d(ngf * 2, ngf, 4, 2, 1, bias=False),
nn.BatchNorm2d(ngf),
nn.ReLU(True),
# state size. (ngf) x 32 x 32
nn.ConvTranspose2d(ngf, nc, 4, 2, 1, bias=False),
nn.Tanh()
)
def forward(self, input):
return self.main(input)
class Discriminator(nn.Module):
def __init__(self, ngpu):
super(Discriminator, self).__init__()
self.ngpu = ngpu
self.main = nn.Sequential(
# input is (nc) x 128 x 128
nn.Conv2d(nc, ndf, 4, stride=2, padding=1, bias=False),
nn.LeakyReLU(0.2, inplace=True),
# state size. (ndf) x 64 x 64
nn.Conv2d(ndf, ndf * 2, 4, stride=2, padding=1, bias=False),
nn.BatchNorm2d(ndf * 2),
nn.LeakyReLU(0.2, inplace=True),
# state size. (ndf*2) x 32 x 32
nn.Conv2d(ndf * 2, ndf * 4, 4, stride=2, padding=1, bias=False),
nn.BatchNorm2d(ndf * 4),
nn.LeakyReLU(0.2, inplace=True),
# state size. (ndf*4) x 16 x 16
nn.Conv2d(ndf * 4, ndf * 8, 4, stride=2, padding=1, bias=False),
nn.BatchNorm2d(ndf * 8),
nn.LeakyReLU(0.2, inplace=True),
# state size. (ndf*8) x 8 x 8
nn.Conv2d(ndf * 8, ndf * 16, 4, stride=2, padding=1, bias=False),
nn.BatchNorm2d(ndf * 16),
nn.LeakyReLU(0.2, inplace=True),
# state size. (ndf*8) x 8 x 8
nn.Conv2d(ndf * 16, ndf * 32, 4, stride=2, padding=1, bias=False),
nn.BatchNorm2d(ndf * 32),
nn.LeakyReLU(0.2, inplace=True),
# state size. (ndf*16) x 4 x 4
nn.Conv2d(ndf * 32, 1, 4, stride=1, padding=0, bias=False),
nn.Sigmoid()
# state size. 1
)
def forward(self, input):
return self.main(input)
# Create the Discriminator
netD = Discriminator(ngpu).to(device)
# Handle multi-gpu if desired
if (device.type == 'cuda') and (ngpu > 1):
netD = nn.DataParallel(netD, list(range(ngpu)))
# Apply the weights_init function to randomly initialize all weights
# to mean=0, stdev=0.2.
netD.apply(weights_init)
# Print the model
print(netD)
# Initialize BCELoss function
criterion = nn.BCELoss()
# Create batch of latent vectors that we will use to visualize
# the progression of the generator
fixed_noise = torch.randn(64, nz, 1, 1, device=device)
# Establish convention for real and fake labels during training
real_label = 1.
fake_label = 0.
# Setup Adam optimizers for both G and D
optimizerD = optim.Adam(netD.parameters(), lr=lr, betas=(beta1, 0.999))
optimizerG = optim.Adam(netG.parameters(), lr=lr, betas=(beta1, 0.999))
0# Training Loop
# Lists to keep track of progress
img_list = []
G_losses = []
D_losses = []
iters = 0
print("Starting Training Loop...")
# For each epoch
for epoch in range(num_epochs):
# For each batch in the dataloader
for i, data in enumerate(dataloader, 0):
############################
# (1) Update D network: maximize log(D(x)) + log(1 - D(G(z)))
###########################
## Train with all-real batch
netD.zero_grad()
# Format batch
real_cpu = data[0].to(device)
b_size = real_cpu.size(0)
label = torch.full((b_size,), real_label, dtype=torch.float, device=device)
# Forward pass real batch through D
output = netD(real_cpu).view(-1)
# Calculate loss on all-real batch
errD_real = criterion(output, label)
# Calculate gradients for D in backward pass
errD_real.backward()
D_x = output.mean().item()
## Train with all-fake batch
# Generate batch of latent vectors
noise = torch.randn(b_size, nz, 1, 1, device=device)
# Generate fake image batch with G
fake = netG(noise)
label.fill_(fake_label)
# Classify all fake batch with D
output = netD(fake.detach()).view(-1)
# Calculate D's loss on the all-fake batch
errD_fake = criterion(output, label)
# Calculate the gradients for this batch, accumulated (summed) with previous gradients
errD_fake.backward()
D_G_z1 = output.mean().item()
# Compute error of D as sum over the fake and the real batches
errD = errD_real + errD_fake
# Update D
optimizerD.step()
############################
# (2) Update G network: maximize log(D(G(z)))
###########################
netG.zero_grad()
label.fill_(real_label) # fake labels are real for generator cost
# Since we just updated D, perform another forward pass of all-fake batch through D
output = netD(fake).view(-1)
# Calculate G's loss based on this output
errG = criterion(output, label)
# Calculate gradients for G
errG.backward()
D_G_z2 = output.mean().item()
# Update G
optimizerG.step()
# Output training stats
if i % 100 == 0:
print('[%d/%d][%d/%d]\tLoss_D: %.4f\tLoss_G: %.4f\tD(x): %.4f\tD(G(z)): %.4f / %.4f'
% (epoch, num_epochs, i, len(dataloader),
errD.item(), errG.item(), D_x, D_G_z1, D_G_z2))
# Save Losses for plotting later
G_losses.append(errG.item())
D_losses.append(errD.item())
# Check how the generator is doing by saving G's output on fixed_noise
if (iters % 500 == 0) or ((epoch == num_epochs-1) and (i == len(dataloader)-1)):
with torch.no_grad():
fake = netG(fixed_noise).detach().cpu()
img_list.append(vutils.make_grid(fake, padding=2, normalize=True))
iters += 1
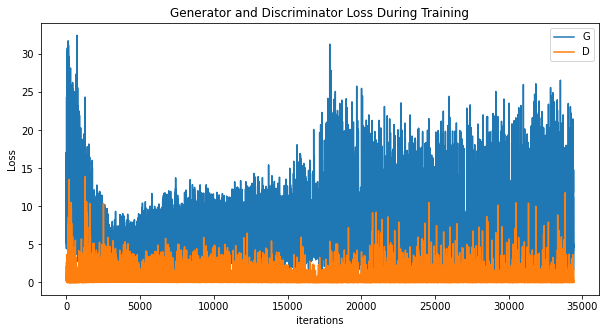
Result