import torch
import torch.nn.functional as F
# Assume you have 2 values for each z,y,x location
data = torch.rand(2, 64, 256, 256).float()
# lets create a rotation matrix
# for sanity check take identity as rotation matix firs
rot_mat = torch.FloatTensor([[1, 0, 0],[0, 1, 0],[0, 0, 1]]) # identity
# then test with the following
# rot_mat = torch.FloatTensor([[0, 1, 0],[1, 0, 0],[0, 0, 1]]) # 90 degreee rotation around z
print('rotation matrix \n', rot_mat)
print('determinant === ', torch.det(rot_mat))
def get_3d_locations(d,h,w,device_):
locations_x = torch.linspace(0, w-1, w).view(1, 1, 1, w).to(device_).expand(1, d, h, w)
locations_y = torch.linspace(0, h-1, h).view(1, 1, h, 1).to(device_).expand(1, d, h, w)
locations_z = torch.linspace(0, d-1,d).view(1, d, 1, 1).to(device_).expand(1, d, h, w)
# stack locations
locations_3d = torch.stack([locations_x, locations_y, locations_z], dim=4).view(-1, 3, 1)
return locations_3d
def rotate(input_tensor, rotation_matrix):
device_ = input_tensor.device
_, d, h, w = input_tensor.shape
input_tensor = input_tensor.unsqueeze(0)
# get x,y,z indices of target 3d data
locations_3d = get_3d_locations(d, h, w, device_)
# rotate target positions to the source coordinate
rotated_3d_positions = torch.bmm(rotation_matrix.view(1, 3, 3).expand(d*h*w, 3, 3), locations_3d).view(1, d,h,w,3)
rot_locs = torch.split(rotated_3d_positions, split_size_or_sections=1, dim=4)
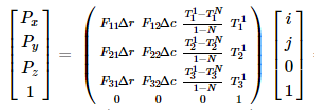
# change the range of x,y,z locations to [-1,1]
normalised_locs_x = (2.0*rot_locs[0] - (w-1))/(w-1)
normalised_locs_y = (2.0*rot_locs[1] - (h-1))/(h-1)
normalised_locs_z = (2.0*rot_locs[2] - (d-1))/(d-1)
grid = torch.stack([normalised_locs_x, normalised_locs_y, normalised_locs_z], dim=4).view(1, d, h, w, 3)
# here we use the destination voxel-positions and sample the input 3d data trilinearly
rotated_signal = F.grid_sample(input=input_tensor, grid=grid, mode='nearest', align_corners=True)
return rotated_signal.squeeze(0)
rotated_data = rotate(data, rot_mat)
print(data.shape)
print(rotated_data.shape)
print(torch.mean(rotated_data - data)) # 0 , for identity rotation