I try to understand how GRU work in the model.
I already read the GRU document.
I think I known how it work in the forward process.
Here is my example for demo forward follow blow.
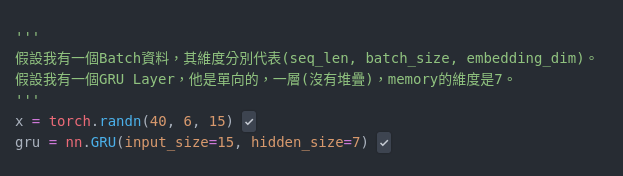
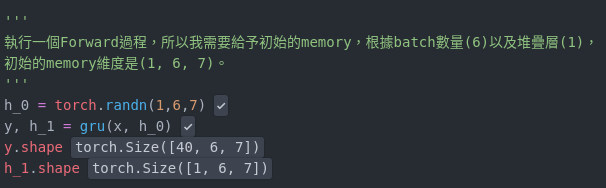
For each input data, I need to initialize a hidden state.
In training process, I can randomly initialize it.
After finishing training process, if I want to test a real data, how to determine the initial hidden state?
Still by randomly choose? Or I make some mistake about forward of GRU?