Hi @ptrblck , I am trying to implement a multi-task loss function where I have one encoder and multiple decoders. The input is from multiple domains and it tries to jointly achieve good reconstruction of all source data given a particular segment of train data.
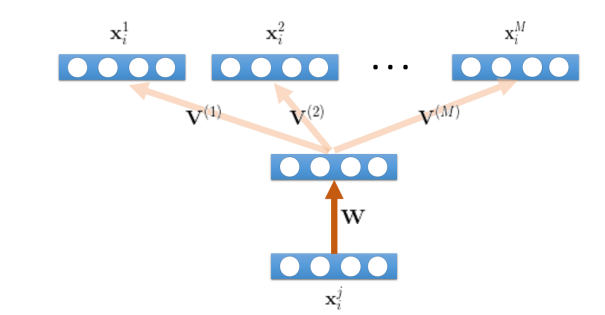
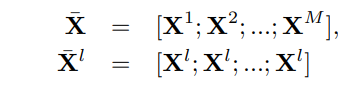
In order to achieve it, all the samples from different domains are concatenated together like this. Here 1-M are the different domains and l is the replicated data from the lth domain.
The code is below:
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
from dataset import Dataset
from autoencoder import Autoencoder
import numpy as npdevice = torch.device(“cuda:0” if torch.cuda.is_available() else “cpu”)
num_epochs = 500
batch_size = 27
learning_rate = 0.005
feats = 29
domains = 3
latent_dims = 10model = Autoencoder().to(device)
criterion = nn.MSELoss()class MultitaskAutoencoder(nn.Module):
def __init__(self): super().__init__() self.encoder = nn.Sequential( nn.Linear(feats, latent_dims), nn.ReLU(), # nn.Linear(4, 3) ) self.decoders = nn.ModuleList() for _ in range(batch_size): self.decoders.append(nn.Linear(10, feats)) self.encoder_hidden_layer = nn.Linear( in_features=feats, out_features=20 ) self.encoder_output_layer = nn.Linear( in_features=20, out_features=10 ) def forward(self, inputs): #inputs--> batch_size activation = self.encoder_hidden_layer(inputs) activation = torch.relu(activation) code = self.encoder_output_layer(activation) code = torch.relu(code) #z.append(code) outs = [] for idx, dec in enumerate(self.decoders): outs.append(dec(code[idx])) outs = torch.stack(outs) return outsmultitaskAE = MultitaskAutoencoder().to(device)
optimizer = torch.optim.Adam(multitaskAE.parameters(), lr=learning_rate, weight_decay=1e-5)def train_AE():
dataset = Dataset()
dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True)for epoch in range(100): train_loss = 0.0 for input, out in dataloader: input = input.float().to(device) #print('input.shape = ', input.shape) # 128 * 256 dom_out = out.float().to(device) ## original data # 128 * 256 #print('dom_out.shape = ', dom_out.shape) # 128 * 256 output = multitaskAE(input) #print('predicted output.shape = ', output.shape) # 128 * 256 -- reconstructed values loss = criterion(output, dom_out) loss.backward() optimizer.zero_grad() train_loss += loss.item() print('===> Loss: ', train_loss / len(dataloader))train_AE()
The dataset generator is as below:
def construct_pair(X_list): # 3 * 10000 * 29
n_dom = len(X_list) # 3 * 10000 * 29 #print("Xin shape BEFORE virtual stack:", X_list.shape) X_in = np.vstack(X_list) ## 30000 * 29 print("Xin SHAPE TRAIN DATA", X_in.shape) X_outs = [] # ground truth data for i in range(0, n_dom): # for each domain X = X_list[i] # take first domain 1 * 10000 * 29 print("X shape:", X.shape) ## X shape: 1 * 10000 * 29 Z_list = [] for j in range(0, n_dom): Z_list.append(X) # make 3 (num of domains) copies of the same 1000 samples. 3 * 10000 * 29 Z = np.vstack(Z_list) # Z shape: 30000 * 29 print("Z shape:", Z.shape) X_outs.append(Z) # 3 * 30000 * 29 ## same samples repeated to nos of domains. print("XOUT SHAPE ", len(X_outs)) return X_in, X_outs
Blockquote
My loss value is stuck and loss is not converging. Can you please give some hints on what am I doing wrong here? Thanks a lot!