I am learning the object detection fine-tuning tutorial in the pytorch tutorial, and there is the case that loss is nan during the training.
This is my code:
anno={'image':image,'bboxes':[box],'id':[1]}
aug=self.transform(**anno)
image=torch.from_numpy(aug['image']).permute(2,0,1).float()
box=torch.as_tensor(np.array(aug['bboxes']),dtype=torch.float32)
labels=torch.ones(1,dtype=torch.int64)
image_id=torch.tensor([index])
area=(box[:,3]-box[:,1])*(box[:,2]-box[:,0])
iscrowd=torch.zeros(1,dtype=torch.uint8)
target={}
target['boxes']=box
target['labels']=labels
target['image_id']=image_id
target['area']=area
target['iscrowd']=iscrowd
print(box)
return image,target
from torchvision.models.detection.faster_rcnn import FastRCNNPredictor
model=torchvision.models.detection.fasterrcnn_resnet50_fpn(pretrained=True)
num_class=2
in_features=model.roi_heads.box_predictor.cls_score.in_features
model.roi_heads.box_predictor=FastRCNNPredictor(in_features,num_class)
print(model)
num_epoch=20
params=[p for p in model.parameters() if p.requires_grad]
optimizer=torch.optim.SGD(params,lr=0.005,momentum=0.9,weight_decay=0.0005)
lr_scheduler=torch.optim.lr_scheduler.StepLR(optimizer,step_size=3,gamma=0.1)
device = torch.device('cuda') if torch.cuda.is_available() else torch.device('cpu')
model.to(device)
for epoch in range(num_epoch):
train_one_epoch(model,optimizer,train_dl,device,epoch,print_freq=10)
lr_scheduler.step()
evaluate(model,valid_dl,device)
model_path=path/'box.pt'
model.save(model.state_dict(),model_path)
Basically all the processes follow the tutorial!
While I was looking for a solution, I saw that it might be box’s xim>xmax
So I printed the box, but it didn’t happen!
Here’s what’s wrong:
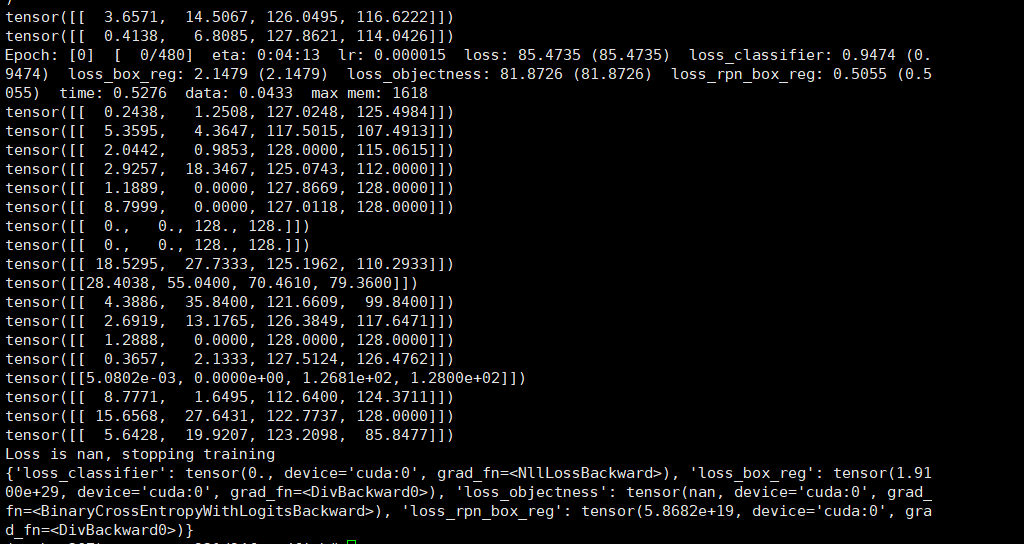
What should I do?