I am having trouble with the loss function corresponding to the REINFORCE with Baseline algorithm as described in Sutton and Barto book:
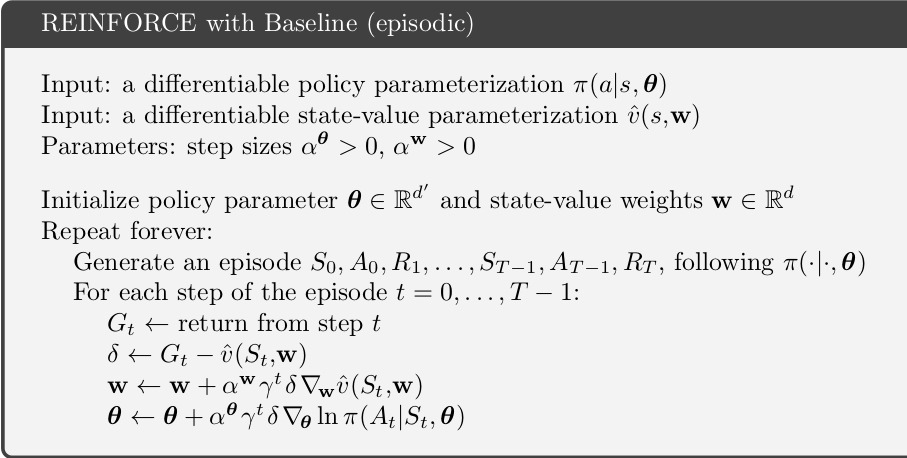
The last line is the update for the policy net.
Let gamma=1 for simplicity…
Now I want to construct loss function for the policy net output, so that I could backpropagate through it after playing one episode.
I am guessing it should be P_loss = - sum_over_episode(log_p*delta). The minus comes from the fact that in pytorch we minimize a loss function, but the update rule in the book tells us how to do gradient ascent for maximizing the objective.
I implemented training at each episode as follows:
# network
class MLP(nn.Module):
def __init__(self, input_dim, output_dim, hidden=256):
super().__init__()
self.fc1 = nn.Linear(input_dim, hidden)
self.fc2 = nn.Linear(hidden, hidden)
self.fc3 = nn.Linear(hidden, output_dim)
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
q = F.relu(self.fc3(x))
q = F.log_softmax(q, dim=-1)
return q
def policy_loss(returns, baselines, log_p_taken):
loss = -torch.sum((returns - baselines)*log_p_taken)
return loss
when training:
for ep in range(N_ep):
...
self.optimizer_p.zero_grad()
log_P = P_net(ep_states) # P_net is an instance of MLP net declared above
log_P_taken = torch.gather(log_P, 1, ep_taken_actions.view(-1, 1)).squeeze()
P_loss = policy_loss(ep_returns, ep_baselines, log_P_taken)
P_loss.backward()
self.optimizer_p.step()
...
However, training seems to never converge with that loss, but trainin with P_loss_negative = - P_loss gives good results. Training with P_loss_negative passes cartpole_v0 and almost passes cartpole_v1, while training with P_loss always diverges.
Please help me find what is wrong. Thank you!!