Hello. I am working on this tutorial: TorchVision Object Detection Finetuning Tutorial — PyTorch Tutorials 2.2.0+cu121 documentation. I trained model and made predictions with py file below:
from PIL import Image
import torch
import numpy as np
from torchvision import transforms
from torch.autograd import Variable
import cv2
loader = transforms.Compose([transforms.ToTensor()])
def img_loader(img_path):
img = Image.open(img_path)
img = img.convert('RGB')
img = loader(img).float()
img = Variable(img, requires_grad=True)
return img.cuda()
path = r't4.png'
model = torch.load('network')
model.eval()
img_arr = img_loader(path)
with torch.no_grad():
pred = model([img_arr])
iter_num = len(pred[0]['boxes'])
img1 = cv2.imread(path)
#where I draw bboxes
for i in range(iter_num):
tl = (pred[0]['boxes'][i][0],pred[0]['boxes'][i][1])
br = (pred[0]['boxes'][i][2],pred[0]['boxes'][i][3])
img1 = cv2.rectangle(img1,tl,br, (0,0,255), 2)
output = Image.fromarray(pred[0]['masks'][0, 0].mul(255).byte().cpu().numpy())
print(output)
cv2_output = np.array(output)
cv2_output = cv2_output[:, :-1].copy()
cv2.imshow('out', img1)
cv2.imwrite('todiscuss.png', img1)
cv2.waitKey(0)
print('Done')
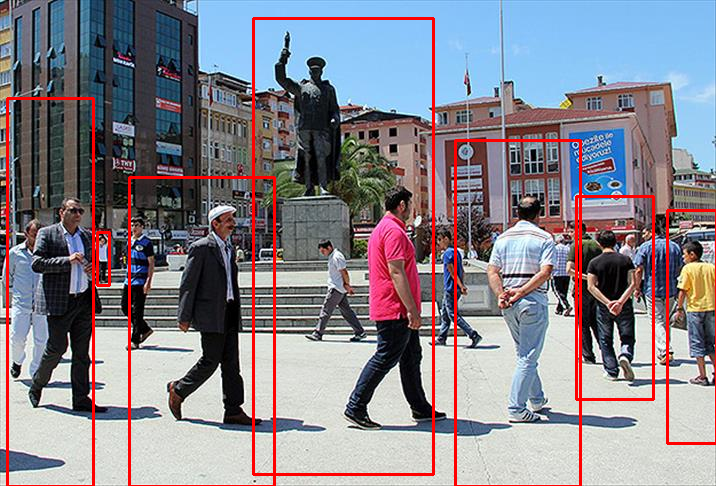
When I draw boundary boxes I got this result:
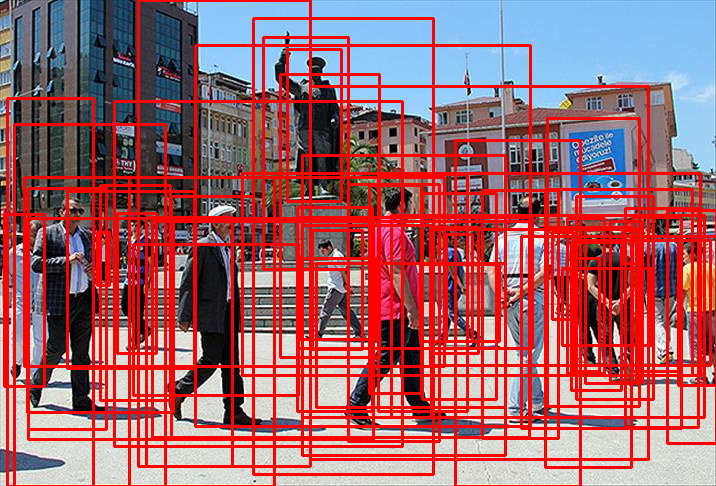
As it seen in image, pred = model(img) returns lots of bboxes. Is there any way to set a threshold for returned bboxes?