I’m creating a sequence to sequence model based on an auto-encoder to map a sequence of words to another sequence of words. The data I am using is sizable so batch training is essential. Now, defining the encoder seems to be straightforward. But I was wondering what should be the input of the decoder since at each time step t the decoder receives a hidden vector and its own output from t-1 as input.
I am not sure how to pass the output of the decoder to itself as an input of the next time step when training with batch.
Below is how I define an encoder and decoder, but the input of the decoder is missing.
class seq2seq(nn.Module):
def __init__(self, ):
super(seq2seq, self).__init__()
self.embed = nn.Embedding(embedding_input_size, embedding_hidden_size)
self.encoder = nn.GRU(input_size=embedding_hidden_size,
hidden_size=encoder_hidden_size,
num_layers=1)
self.decoder = nn.GRU(input_size=encoder_hidden_size,
hidden_size=decoder_hidden_size,
num_layers=1)
# sos_vec is the one hot vector representing the start of sequence
decoder_first_inp = Variable(torch.LongTensor(sos_vec))
def forward(self, input_btch, hidden_btch):
encO, encH = self.encoder(input_btch, hidden_btch)
decO, decH = self.decoder(???, encH)
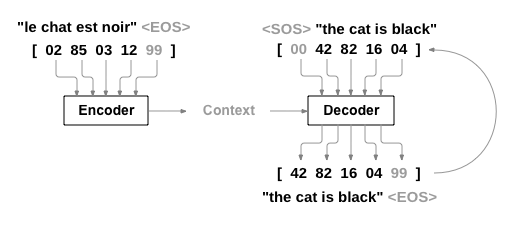
The inputs of your decoder must be the context (derivated from the encoder’s final hidden) that is used to initialize the hidden for your decoder, and the target sequence (sos+“the cat is black”). So you should have something lie this (I’m trying to use your notations):
Just in case you want to have different hidden sizes for encoder and decoder you can add a linear layer to change the size of encH or, also, sometimes the context is sampled from a distribution derived from encH: https://arxiv.org/pdf/1511.06349.pdf, especially if the space is continuous
Thanks, that’s sounds like a good idea. As an alternative, I made my decoder accept the Boolean input argument predict. When this argument is true, the input of each time step becomes the output of the previous time step. I think this is more memory efficient, given that I am running these models on a GPU. But then again, I assume the weights do not consume so much memory unless the model has many layers.
@mfa hi, I am also trying to build AE for sentences with batch training. After creating the custom dataset for sentences with padding and lengths parameters for each sentence, i am stuck how to move forward. Can you share your code?