I run into this error when training adversarial autoencoder network
for epoch in range(num_epochs):
# init mini batch counter
mini_batch_count = 0
# init epoch training losses
batch_reconstruction_losses = 0.0
batch_discriminator_losses = 0.0
batch_generator_losses = 0.0
# determine if GPU training is enabled
if (torch.backends.cudnn.version() != None) and (USE_CUDA == True):
# set all networks / models in GPU mode
encoder_train.cuda()
decoder_train.cuda()
discriminator_train.cuda()
# set networks in training mode (apply dropout when needed)
encoder_train.train()
decoder_train.train()
discriminator_train.train()
# start timer
start_time = datetime.now()
# iterate over epoch mini batches
for mini_batch_data in dataloader:
# increase mini batch counter
mini_batch_count += 1
# determine if GPU training is enabled
if (torch.backends.cudnn.version() != None) and (USE_CUDA == True):
# convert mini batch to torch variable
mini_batch_torch = torch.cuda.FloatTensor(mini_batch_data)
else:
# convert mini batch to torch variable
mini_batch_torch = torch.FloatTensor(mini_batch_data)
# reset the networks gradients
encoder_train.zero_grad()
decoder_train.zero_grad()
discriminator_train.zero_grad()
# =================== reconstruction phase =====================
# run autoencoder encoding - decoding
z_sample = encoder_train(mini_batch_torch)
mini_batch_reconstruction = decoder_train(z_sample)
# split input date to numerical and categorical part
batch_cat = mini_batch_torch[:, :ori_dataset_categ_transformed.shape[1]]
batch_num = mini_batch_torch[:, ori_dataset_categ_transformed.shape[1]:]
# split reconstruction to numerical and categorical part
rec_batch_cat = mini_batch_reconstruction[:, :ori_dataset_categ_transformed.shape[1]]
rec_batch_num = mini_batch_reconstruction[:, ori_dataset_categ_transformed.shape[1]:]
# backward pass + gradients update
rec_error_cat = reconstruction_criterion_categorical(input=rec_batch_cat, target=batch_cat) # one-hot attr error
rec_error_num = reconstruction_criterion_numeric(input=rec_batch_num, target=batch_num) # numeric attr error
# combine both reconstruction errors
reconstruction_loss = rec_error_cat + rec_error_num
# run backward pass - determine gradients
reconstruction_loss.backward()
# collect batch reconstruction loss
batch_reconstruction_losses += reconstruction_loss.item()
# update network parameter - decoder and encoder
decoder_optimizer.step()
encoder_optimizer.step()
# =================== regularization phase =====================
# =================== discriminator training ===================
# set discriminator in evaluation mode
discriminator_train.eval()
# generate target latent space data
z_target_batch = z_continous_samples_all[random.sample(range(0, z_continous_samples_all.shape[0]), mini_batch_size),:]
# convert to torch tensor
z_target_batch = torch.FloatTensor(z_target_batch)
if (torch.backends.cudnn.version() != None) and (USE_CUDA == True):
z_target_batch = z_target_batch.cuda()
# determine mini batch sample generated by the encoder -> fake gaussian sample
z_fake_gauss = encoder_train(mini_batch_torch)
# determine discriminator classification of both samples
d_real_gauss = discriminator_train(z_target_batch) # real sampled gaussian
d_fake_gauss = discriminator_train(z_fake_gauss) # fake created gaussian
# determine discriminator classification target variables
d_real_gauss_target = torch.FloatTensor(torch.ones(d_real_gauss.shape)) # real -> 1
d_fake_gauss_target = torch.FloatTensor(torch.zeros(d_fake_gauss.shape)) # fake -> 0
# determine if GPU training is enabled
if (torch.backends.cudnn.version() != None) and (USE_CUDA == True):
# push tensors to CUDA
d_real_gauss_target = d_real_gauss_target.cuda()
d_fake_gauss_target = d_fake_gauss_target.cuda()
# determine individual discrimination losses
discriminator_loss_real = discriminator_criterion(target=d_real_gauss_target, input=d_real_gauss) # real loss
discriminator_loss_fake = discriminator_criterion(target=d_fake_gauss_target, input=d_fake_gauss) # fake loss
# add real loss and fake loss
discriminator_loss = discriminator_loss_fake + discriminator_loss_real
# run backward through the discriminator network
discriminator_loss.backward()
# collect discriminator loss
batch_discriminator_losses += discriminator_loss.item()
# update network the discriminator network parameters
discriminator_optimizer.step()
# reset the networks gradients
encoder_train.zero_grad()
decoder_train.zero_grad()
discriminator_train.zero_grad()
# =================== regularization phase =====================
# =================== generator training =======================
# set encoder / generator in training mode
encoder_train.train()
# reset the encoder / generator networks gradients
encoder_train.zero_grad()
# determine fake gaussian sample generated by the encoder / generator
z_fake_gauss = encoder_train(mini_batch_torch)
# determine discriminator classification of fake gaussian sample
d_fake_gauss = discriminator_train(z_fake_gauss)
# determine discriminator classification target variables
d_fake_gauss_target = torch.FloatTensor(torch.ones(d_fake_gauss.shape)) # fake -> 1
# determine if GPU training is enabled
if (torch.backends.cudnn.version() != None) and (USE_CUDA == True):
# push tensors to CUDA
d_fake_gauss_target = d_fake_gauss_target.cuda()
# determine discrimination loss of fake gaussian sample
generator_loss = discriminator_criterion(target=d_fake_gauss_target, input=d_fake_gauss)
# collect generator loss
batch_generator_losses += generator_loss.item()
# run backward pass - determine gradients
generator_loss.backward()
# update network paramaters - encoder / generatorc
encoder_optimizer.step()
# reset the networks gradients
encoder_train.zero_grad()
decoder_train.zero_grad()
discriminator_train.zero_grad()
# collect epoch training losses - reconstruction loss
epoch_reconstruction_loss = batch_reconstruction_losses / mini_batch_count
epoch_reconstruction_losses.extend([epoch_reconstruction_loss])
# collect epoch training losses - discriminator loss
epoch_discriminator_loss = batch_discriminator_losses / mini_batch_count
epoch_discriminator_losses.extend([epoch_discriminator_loss])
# collect epoch training losses - generator loss
epoch_generator_loss = batch_generator_losses / mini_batch_count
epoch_generator_losses.extend([epoch_generator_loss])
# print epoch reconstruction loss
now = datetime.utcnow().strftime("%Y%m%d-%H:%M:%S")
print('[LOG TRAIN {}] epoch: {:04}/{:04}, reconstruction loss: {:.4f}'.format(now, epoch + 1, num_epochs, epoch_reconstruction_loss))
print('[LOG TRAIN {}] epoch: {:04}/{:04}, discriminator loss: {:.4f}'.format(now, epoch + 1, num_epochs, epoch_discriminator_loss))
print('[LOG TRAIN {}] epoch: {:04}/{:04}, generator loss: {:.4f}'.format(now, epoch + 1, num_epochs, epoch_generator_loss))
# =================== save model snapshots to disk ============================
# save trained encoder model file to disk
now = datetime.utcnow().strftime("%Y%m%d-%H_%M_%S")
encoder_model_name = "{}_ep_{}_encoder_model.pth".format(now, (epoch+1))
torch.save(encoder_train.state_dict(), os.path.join("./models", encoder_model_name))
# save trained decoder model file to disk
decoder_model_name = "{}_ep_{}_decoder_model.pth".format(now, (epoch+1))
torch.save(decoder_train.state_dict(), os.path.join("./models", decoder_model_name))
# save trained discriminator model file to disk
decoder_model_name = "{}_ep_{}_discriminator_model.pth".format(now, (epoch+1))
torch.save(discriminator_train.state_dict(), os.path.join("./models", decoder_model_name))
71 # run backward pass - determine gradients
—> 72 reconstruction_loss.backward()
73
74 # collect batch reconstruction loss
1 frames
/usr/local/lib/python3.9/dist-packages/torch/autograd/init.py in backward(tensors, grad_tensors, retain_graph, create_graph, grad_variables, inputs)
198 # some Python versions print out the first line of a multi-line function
199 # calls in the traceback and some print out the last line
→ 200 Variable.execution_engine.run_backward( # Calls into the C++ engine to run the backward pass
201 tensors, grad_tensors, retain_graph, create_graph, inputs,
202 allow_unreachable=True, accumulate_grad=True) # Calls into the C++ engine to run the backward pass
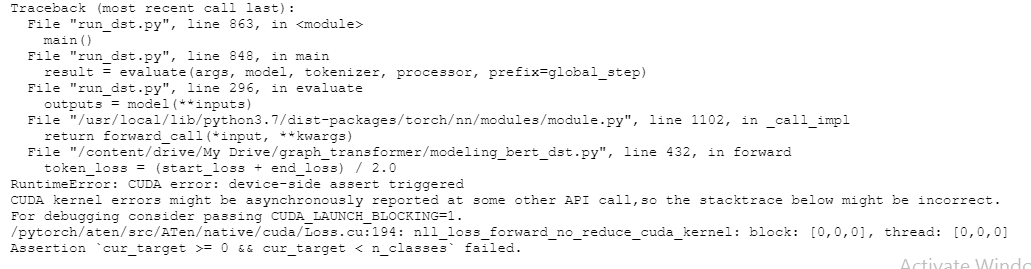
RuntimeError: CUDA error: device-side assert triggered
CUDA kernel errors might be asynchronously reported at some other API call, so the stacktrace below might be incorrect.
For debugging consider passing CUDA_LAUNCH_BLOCKING=1.
Compile with TORCH_USE_CUDA_DSA to enable device-side assertions.