I’m trying to use the model output as indexes to create a 3d point cloud. Because in order to calculate the loss I want to convolve it.
code:
for epoch in range(num_epochs):
optimizer.zero_grad() # Zero the gradients
output = model(masked_coords)
points_3d = gen_3d(200,200,35, mask, output)
psf_output = conv_3D(points_3d,IPSF)
loss = loss_fn(psf_output, target)
loss. Backward() # Backpropagation
optimizer.step() # Update weights
This is my gen_3d function:
def gen_3d(x,y,z, mask, depths):
pc = torch.zeros(x,y,z)
_pc = pc.view(-1,z)
m = mask.flatten()
d = (depths*z).int().flatten()
_pc[m, d] += 1
return torch.nn.functional.pad(pc, (0, 0, 10, 10, 10, 10))
Error:
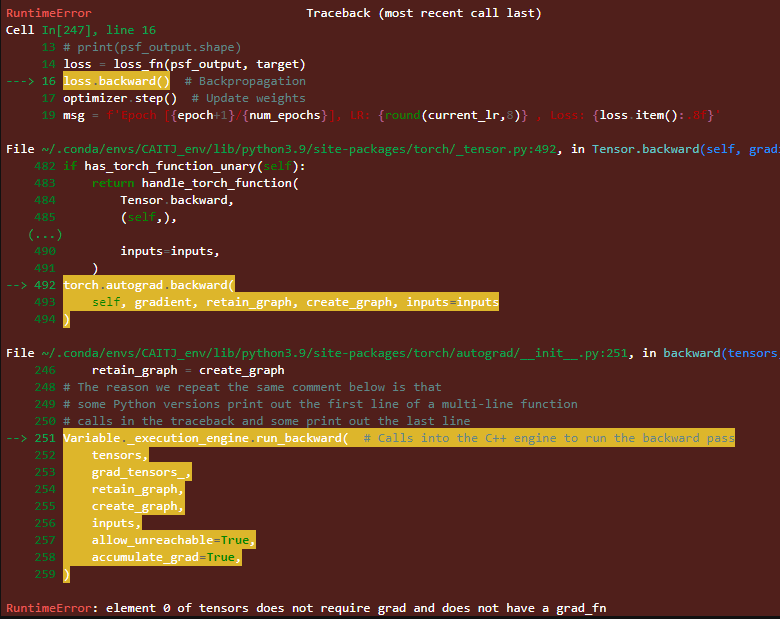
seems like the process is not differentiable. Is there a way to solve this?