Hello everybody,
I am trying to make SARSA / Q-Learning / Double Q Learning work, but none of them works. Maybe someone can find a mistake in the setup of my problem?
So my world is a simple Markov Model with 2 states and 2 actions.
I modelled x(s,a) as a concatenation of one hot vectors for both, because my states.
I set P[s, a, s’] and R[s, a] so that the ideal policy would be pi(s0) = a0 and pi(s1) = a1. However every algorithm I tried SARSA / Q-Learning / Double Q Learning, it converges to a policy, but not to the optimal one. The interesting thing is that the policy it converges to always has the same action for every state.
I tried every possible value for eps, gamma, learning rate and different periods how often to update the target-weights.
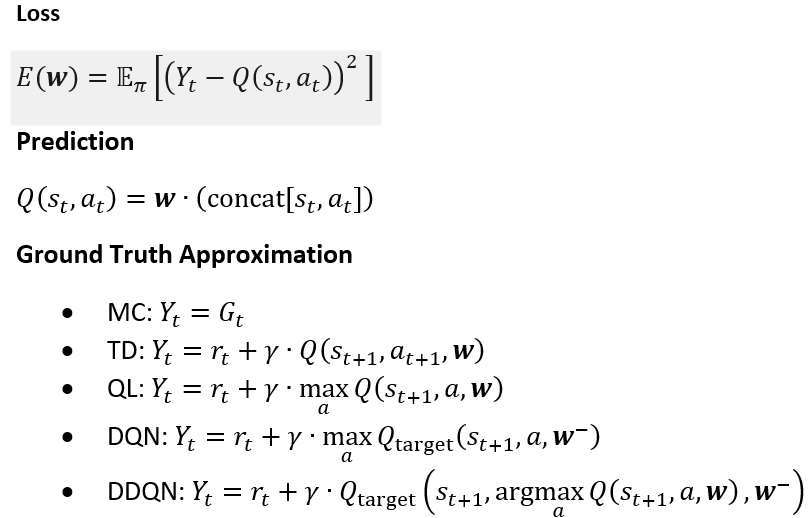
My last hope is, maybe I didn’t understand the formula correctly?
This is my procecudure:
- set requires_grad=False on all parameters of Q_target
- sample a, observe (s,a,r,s’)
- calculate Y and Q= max Q(s,a) and a_max = argmax Q(s,a)
- update agent policy (1-eps) → a_max, (eps) → other action
- loss = (Y - Q)**2
- loss.backward(), optimizer.step(), optimizer.grad_zero()
after couple timesteps copy weights from Q to Q_target