First of all, Thx for the replying!
If window size(K) is 1, I would feed first layer sequentialy from timestamp 0 to 99.
And I am trying to build LSTM autoencoder(reconstruction problem), so that output length should be same as input length.
In other words, if I choose window size 1, the output length is 1. If I choose window size K, output length should be K. It’s like many input, many output.
Also, I don’t like to pass all data in at once. (my real data is over a million time series)
And I’d like to know what if I make overlapping windows. (like stride=1 sliding window)
FYI, The reason why I ask about this question is that I tried to conduct the code which is the answer of the link in my original question.
The link shows LSTM autoencoder with feature=1, batch size=1, and sequence length=5.
I only changed the feature=3. Here is the code I tested.
import torch
import torch.nn as nn
import torch.optim as optim
class LSTM(nn.Module):
# input_dim has to be size after flattening
# For 20x20 single input it would be 400
def __init__(
self,
input_dimensionality: int,
input_dim: int,
latent_dim: int,
num_layers: int,
):
super(LSTM, self).__init__()
self.input_dimensionality: int = input_dimensionality
self.input_dim: int = input_dim # It is 1d, remember
self.latent_dim: int = latent_dim
self.num_layers: int = num_layers
self.encoder = torch.nn.LSTM(self.input_dim, self.latent_dim, self.num_layers)
# You can have any latent dim you want, just output has to be exact same size as input
# In this case, only encoder and decoder, it has to be input_dim though
self.decoder = torch.nn.LSTM(self.latent_dim, self.input_dim, self.num_layers)
def forward(self, input):
# Save original size first:
original_shape = input.shape
# Flatten 2d (or 3d or however many you specified in constructor)
input = input.reshape(input.shape[: -self.input_dimensionality] + (-1,))
# Rest goes as in my previous answer
_, (last_hidden, _) = self.encoder(input)
print(last_hidden.size())
encoded = last_hidden.repeat(input.shape[0], 1, 1)
print(encoded.size())
y, _ = self.decoder(encoded)
print(y.size())
# You have to reshape output to what the original was
reshaped_y = y.reshape(original_shape)
print(torch.squeeze(reshaped_y).size())
return torch.squeeze(reshaped_y)
model = LSTM(input_dimensionality= 1, input_dim=3, latent_dim=20, num_layers=1)
loss_function = nn.MSELoss()
optimizer = optim.Adam(model.parameters())
y = torch.rand(4, 3)
x = y.view(len(y), 1, -1)
print(y)
print(x)
while True:
y_pred = model(x)
optimizer.zero_grad()
loss = loss_function(y_pred, y)
loss.backward()
optimizer.step()
print(y_pred)
print(y)
tensor([[0.3396, 0.4584, 0.4990],
[0.3473, 0.6069, 0.3537],
[0.0018, 0.9779, 0.7858],
[0.5669, 0.7047, 0.7538]])
print(y_pred)
tensor([[0.3681, 0.4199, 0.5355],
[0.3092, 0.6824, 0.3382],
[0.0140, 0.8855, 0.7361],
[0.5692, 0.7194, 0.7820]], grad_fn=<SqueezeBackward0>)
You can see the results are pretty good after several epochs.
Plus, I changed batch size=2 from the above code.(input shape = (4, 2, 3)).
The results are also good.
print(y)
tensor([[[0.1876, 0.2843, 0.4372],
[0.2946, 0.3854, 0.6544]],
[[0.7341, 0.2434, 0.2316],
[0.9146, 0.9394, 0.1762]],
[[0.7286, 0.0147, 0.5048],
[0.0909, 0.4264, 0.3136]],
[[0.3353, 0.7569, 0.5305],
[0.2900, 0.4721, 0.9971]]])
print(y_pred)
tensor([[[0.1760, 0.1595, 0.4767],
[0.3121, 0.3768, 0.7416]],
[[0.7191, 0.0896, 0.3143],
[0.8565, 0.9248, 0.1792]],
[[0.7516, 0.2602, 0.4180],
[0.0731, 0.4455, 0.3333]],
[[0.3654, 0.6303, 0.5079],
[0.2830, 0.4681, 0.8621]]], grad_fn=<ReshapeAliasBackward0>)
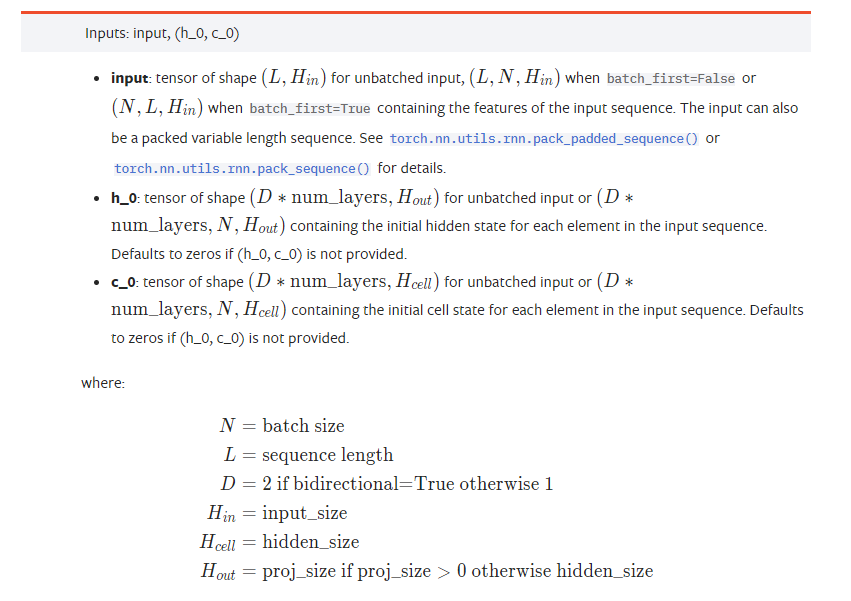
The issue I had is that I don’t like the order so I changed it with using batch_first argument.
This is why I ask about the input dimensions. If I can make my data into these shape and order somehow, game is over. However, I don’t understand fully so I just changed the order.
Whenever I change the batch size > 1 and change the default order, the results tend to be the average.
class LSTM(nn.Module):
# input_dim has to be size after flattening
# For 20x20 single input it would be 400
def __init__(
self,
input_dimensionality: int,
input_dim: int,
latent_dim: int,
num_layers: int,
):
super(LSTM, self).__init__()
self.input_dimensionality: int = input_dimensionality
self.input_dim: int = input_dim # It is 1d, remember
self.latent_dim: int = latent_dim
self.num_layers: int = num_layers
self.encoder = torch.nn.LSTM(self.input_dim, self.latent_dim, self.num_layers, batch_first=True)
# You can have any latent dim you want, just output has to be exact same size as input
# In this case, only encoder and decoder, it has to be input_dim though
self.decoder = torch.nn.LSTM(self.latent_dim, self.input_dim, self.num_layers, batch_first=True)
def forward(self, input):
# Save original size first:
original_shape = input.shape
# Flatten 2d (or 3d or however many you specified in constructor)
input = input.reshape(input.shape[: -self.input_dimensionality] + (-1,))
# Rest goes as in my previous answer
_, (last_hidden, _) = self.encoder(input)
print(last_hidden.size())
encoded = last_hidden.repeat(input.shape[1], 1, 1)
print(encoded.size())
y, _ = self.decoder(encoded)
print(y.size())
# You have to reshape output to what the original was
reshaped_y = y.reshape(original_shape)
return reshaped_y
# print(torch.squeeze(reshaped_y).size())
# return torch.squeeze(reshaped_y)
model = LSTM(input_dimensionality= 1, input_dim=3, latent_dim=20, num_layers=1)
loss_function = nn.MSELoss()
optimizer = optim.Adam(model.parameters())
y = torch.rand(2, 4, 3)
x = y
print(y)
while True:
y_pred = model(x)
optimizer.zero_grad()
loss = loss_function(y_pred, y)
loss.backward()
optimizer.step()
print(y_pred)
Here is the result.
print(y)
tensor([[[0.5823, 0.5620, 0.2612],
[0.2795, 0.0694, 0.2277],
[0.5405, 0.3568, 0.6255],
[0.3243, 0.2372, 0.3427]],
[[0.7686, 0.5203, 0.9025],
[0.7947, 0.8480, 0.8990],
[0.7740, 0.1220, 0.5202],
[0.4073, 0.6483, 0.2592]]])
print(y_pred)
tensor([[[0.6665, 0.3905, 0.5777],
[0.4519, 0.4510, 0.4332],
[0.6665, 0.3905, 0.5777],
[0.4519, 0.4510, 0.4332]],
[[0.6665, 0.3905, 0.5777],
[0.4519, 0.4510, 0.4332],
[0.6665, 0.3905, 0.5777],
[0.4519, 0.4510, 0.4332]]], grad_fn=<UnsafeViewBackward0>)
I really need to figure out how should I make my data into (sequence length, batch size, number of features) or (batch size, sequence length, number of features)
Thx again!!