I would like to know how this can be performed in Pytorch.
######################### [Convolution] -> [Batch Normalization] -> [ReLU] ##################################################
def Conv_block2d(in_channels,out_channels,*args,**kwargs):
return nn.Sequential(nn.Conv2d(in_channels,out_channels,*args,**kwargs,bias=False),nn.BatchNorm2d(out_channels,eps=0.001),nn.ReLU(inplace=True))
#############################################################################################################################
############################## Main Model ##########################################################################################
class MainBlock(nn.Module):
"""docstring for MainBlock"nn.Module"""
def __init__(self):
super(MainBlock,self).__init__()
"""
size = [3,15,33,3,3]
for in_c,out_c,k in zip(size[:2],size[1:3],size[3:]):
print("in channel",in_c,"out channel",out_c,"kernel size",k)
[Convolution] -> []
in channel 3 out channel 15 kernel size 3
(256x256x3) * (3x3x15) = (254x254x15))*(2x2x1) = (127x127x18)
in channel 15 out channel 33 kernel size 3
(127x127x15) * (3x3x33) = (127x127x33))*(2x2x1) = (62x62x33)
"""
self.block1_size = [3,15,33,3,3]
self.block1_out = [nn.Sequential(*Conv_block2d(in_c,out_c,kernel_size=k),nn.MaxPool2d(2,2)) for in_c,out_c,k in zip(self.block1_size[:2],self.block1_size[1:3],self.block1_size[3:])]
self.block1_output = nn.Sequential(*self.block1_out)
def forward(self,x):
# (62x62x33)
x = self.block1_output(x)
return x
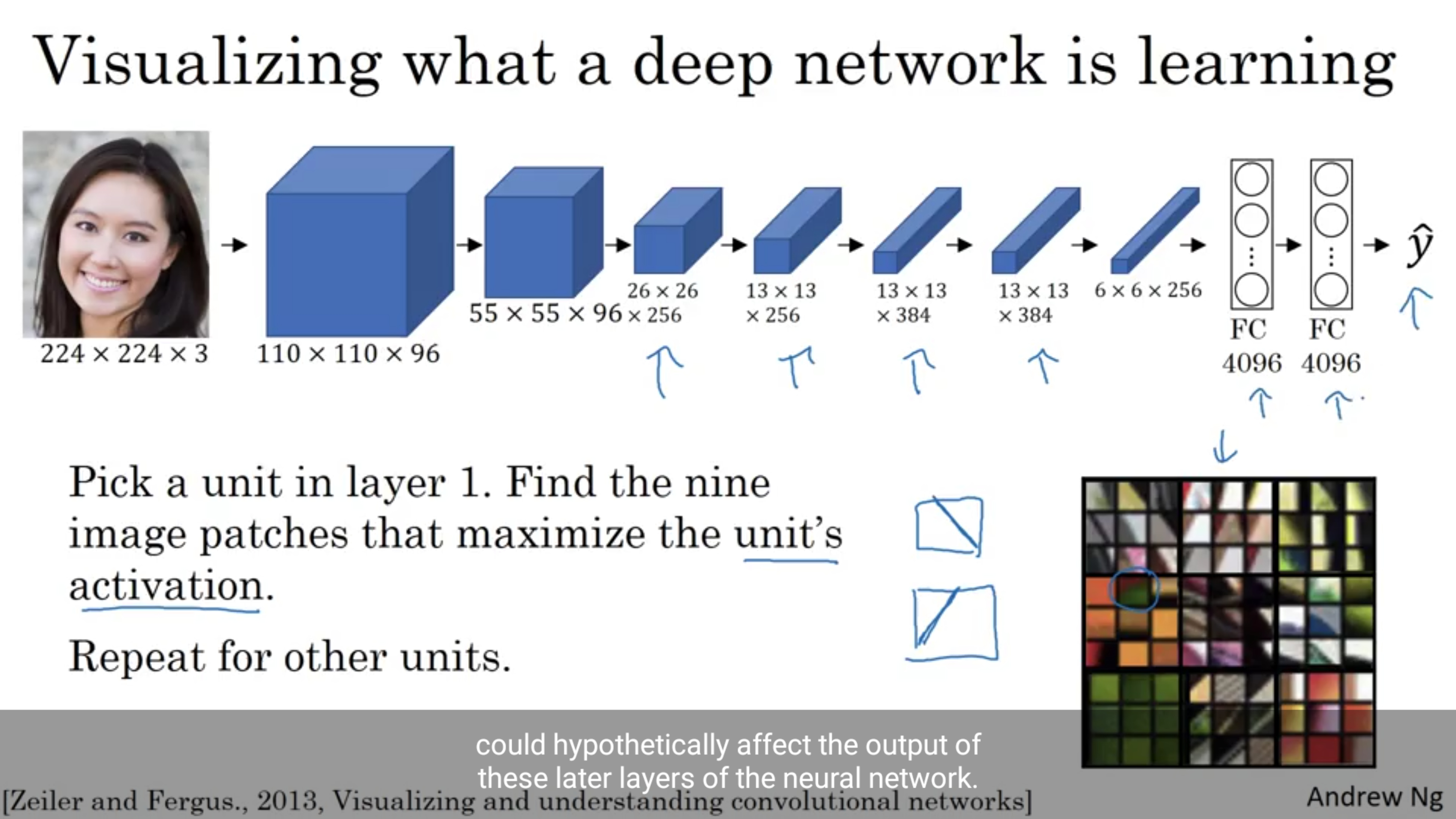
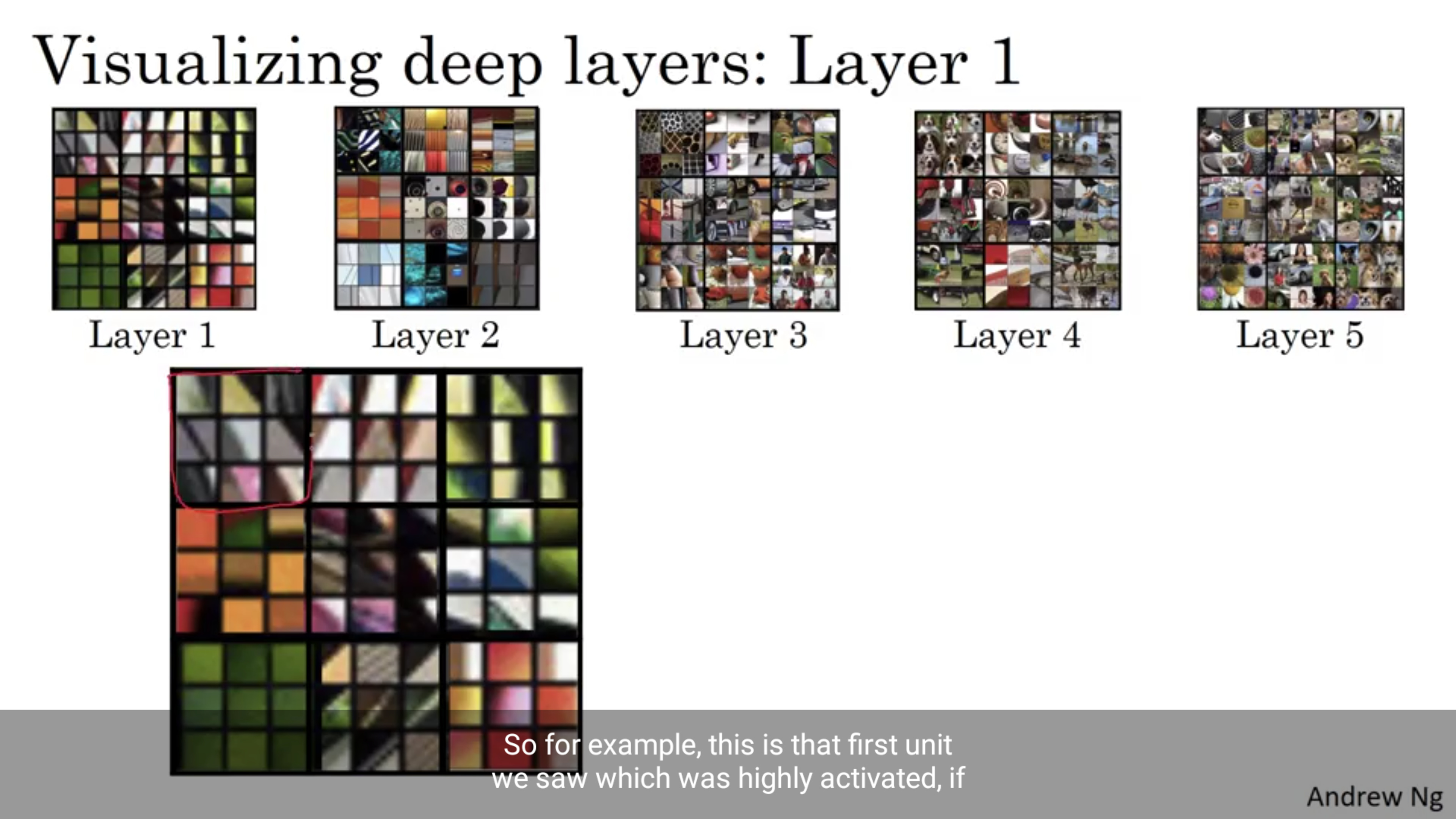
After training the Neural Network
How do i detect the and store image patches that mamimizes the units activation in that specific layer as show in images below?