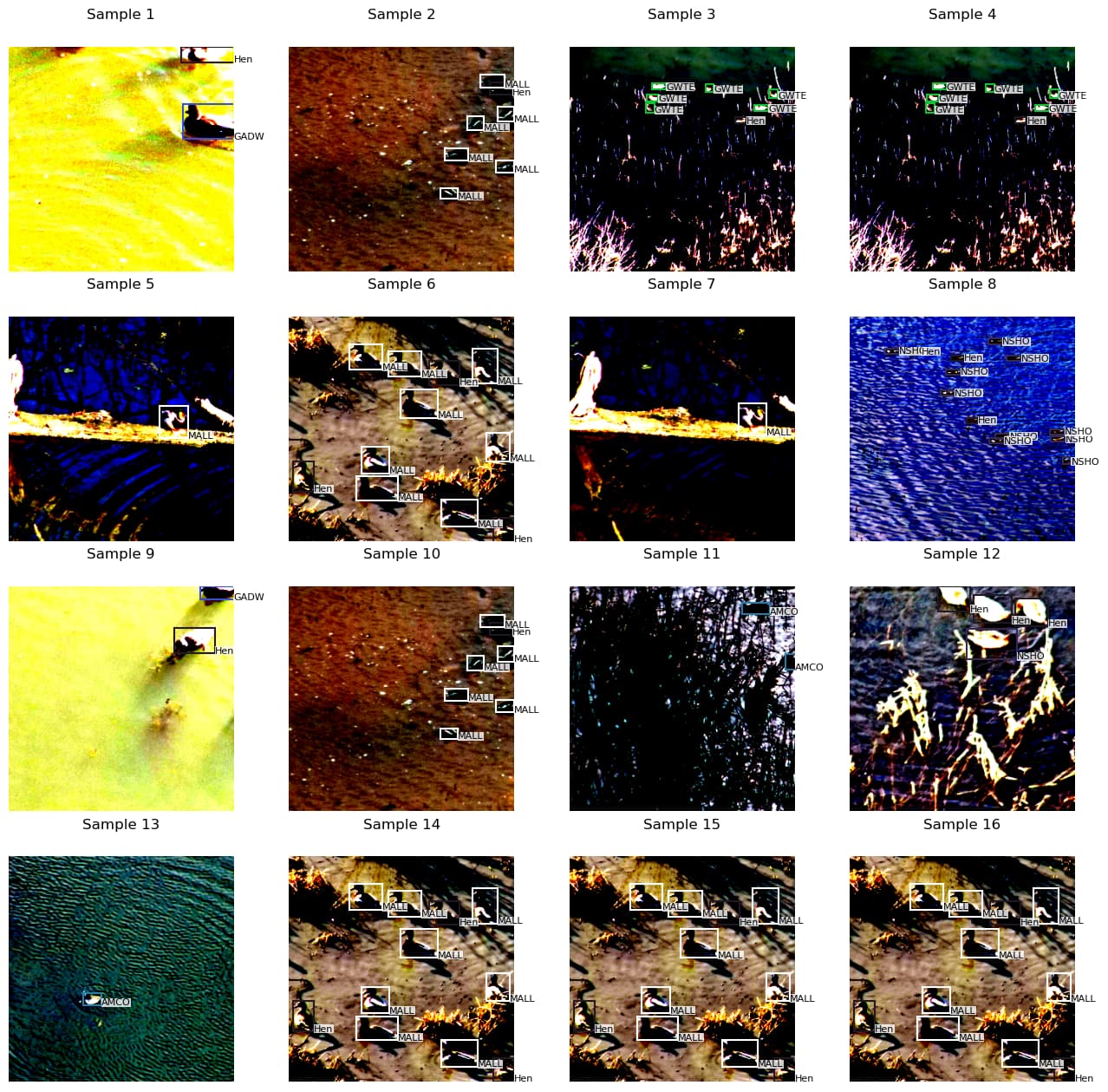
I’m fairly new to PyTorch, so maybe the answer will be obvious to someone else. I’ve got a custom dataset for object detection that returns batches of images and their objects (dictionaries containing boxes, labels, image_id, area, iscrowd). However, when I instantiate and load the custom dataset (see code below), duplicate samples (with the exact same transformations applied) show up in a batch. I’ve included a figure at the bottom showing the duplicate samples in batch.
Can anyone tell me what I’m doing wrong?
Custom transforms applied in custom dataset’s __getitem__():
def transforms(image, boxes, labels, split):
"""
Apply the transformations above.
:param image: image, an ndarray
:param boxes: boxes in boundary coordinates, a tensor of dimensions (n_objects, 4)
:param labels: labels of targets, a tensor of dimensions (n_objects)
:param split: one of 'TRAIN' or 'TEST', since different sets of transformations are applied
:return: transformed image, transformed boxes, transformed labels
"""
np.random.seed(666)
if split == 'TRAIN':
new_image, new_boxes = Rescale(image, boxes,
output_size = (400))
new_image, new_boxes, new_labels = RandomCrop(new_image, new_boxes, labels, output_size = (300))
new_image, new_boxes = RandomHorizontalFlip(new_image, new_boxes)
else:
new_image, new_boxes = Rescale(image, boxes,
output_size = (300))
new_image = image_to_tensor(new_image)
new_image = FT.normalize(new_image, mean, std)
return new_image, new_boxes, new_labels
Custom Dataset :
class Dataset(Dataset):
"""Dataset"""
def __init__(self, csv_file, root_dir, split):
"""
Arguments:
csv_file (string): Path to the CSV file with annotations. (image name, xmin, ymin, xmax, ymax, label)
root_dir (string): Directory containing all images with annotations.
split (string): Train or test, determines which transforms are applied during loading.
"""
self.df = pd.read_csv(csv_file)
self.root_dir = root_dir
self.split = split.upper()
assert self.split in {'TRAIN', 'TEST'}
def __getitem__(self, idx):
if torch.is_tensor(idx):
idx = idx.tolist()
image_path = os.path.join(self.root_dir, self.df.iloc[idx, 0])
image = io.imread(image_path)
boxes = self.df[self.df['img_name'] == self.df.iloc[idx, 0]][['xmin', 'ymin', 'xmax', 'ymax']].values # why are xmin/xmax switched during loading?
labels = self.df[self.df['img_name'] == self.df.iloc[idx, 0]]['label'].values
labels = torch.LongTensor(labels) # (n_objects)
image, boxes, labels = transforms(image, boxes, labels, split = self.split)
boxes = torch.FloatTensor(boxes).reshape(-1, 4) # (n_objects, [xmin, ymin, xmax, ymax])
target = {'boxes': boxes, 'labels': labels, 'image_id': self.df.iloc[idx, 0],
'area': (boxes[:, 3] - boxes[:, 1]) * (boxes[:, 2] - boxes[:, 0]),
'iscrowd': torch.zeros((len(labels,)), dtype=torch.int64)}
return image, target
def __len__(self):
return len(self.df['img_name'].unique())
def collate_fn(self, batch):
"""
Since each image may have a different number of objects, we need a collate function (to be passed to the DataLoader).
This describes how to combine these tensors of different sizes. Use lists.
:param batch: an iterable of N sets from __getitem__()
:return: a tensor of images, dictionary containing lists of varying-size tensors of polygons and targets
"""
# collate function to combine images with varying numbers of objects into batches
images = list()
boxes = list()
labels = list()
image_ids = list()
areas = list()
iscrowds = list()
for b in batch:
images.append(b[0])
boxes.append(b[1]['boxes'])
labels.append(b[1]['labels'])
image_ids.append(b[1]['image_id'])
areas.append(b[1]['area'])
iscrowds.append(b[1]['iscrowd'])
images = torch.stack(images, dim=0)
targets = {'boxes': boxes, 'labels': labels, 'image_ids': image_ids, 'areas': areas, 'iscrowds': iscrowds}
return images, targets # tensor (N, 3, 300, 300), dictionary containing 2 lists of N tensors each
Training dataset:
train_dataset = Dataset(csv_file = '/train/label.csv',
root_dir = '/train/images/',
split = 'TRAIN')
DataLoader using custom collate function
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size = 16, shuffle = True,
collate_fn = train_dataset.collate_fn, num_workers = 0)
Sample batch images and targets from data loader:
images, targets = next(iter(train_loader))
Plotting images, targets from sample batch:
plt.figure(figsize = (16, 64))
for i in range(batch_size):
ax = plt.subplot(16, 4, 1 + i)
plot_detections(images[i], targets['boxes'][i], targets['labels'][i], ax = ax)
plt.axis('off')
plt.title(f"Sample {i + 1}")
plt.show()
Output: