When I use DDP package to train imagenet, there are always OOM problem.
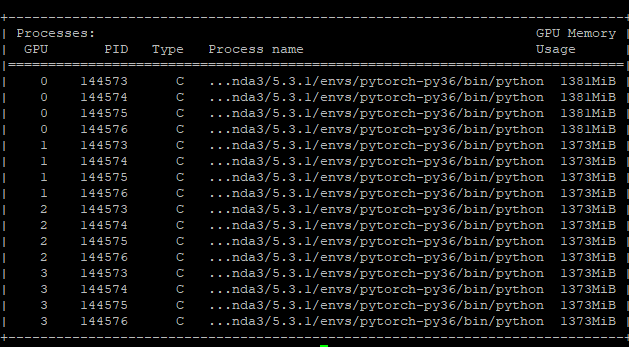
I check the GPU utilization and I found there are many processes on each GPU ?
What is the reason and how can I avoid this problem ?
This shouldn’t happen and each process should use one GPU and thus create one CUDA context.
Are you calling CUDA operations on all devices in the script or did you write device-agnostic code, which only uses a single GPU?
1 Like
Thanks for your reply!
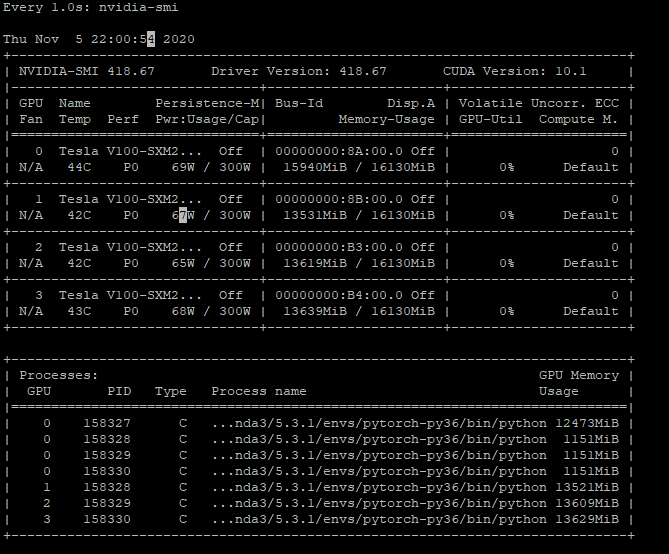
I have four gpu in my node and I do training in one node. The previous problem was that I set the device incorrectly, I set device = torch.device('cuda') instead of device = torch.device('cuda:{}'.format(args.local_rank)).
Now the gpu0 has 4 processes and the other has only one process
This is my script:
import argparse
import os
import random
import shutil
import time
import warnings
import datetime
import torch
import torch.nn as nn
import torch.nn.parallel
import torch.backends.cudnn as cudnn
import torch.distributed as dist
import torch.optim
import torch.utils.data
import torch.utils.data.distributed
import torchvision.transforms as transforms
import torchvision.datasets as datasets
import torchvision.models as models
import Inceptionv3Net as Incepv3
model_names = sorted(name for name in models.__dict__
if name.islower() and not name.startswith("__")
and callable(models.__dict__[name]))
parser = argparse.ArgumentParser(description='PyTorch ImageNet Training')
parser.add_argument('data', metavar='DIR',
help='path to dataset')
parser.add_argument('-a', '--arch', metavar='ARCH', default='resnet18',
choices=model_names,
help='model architecture: ' +
' | '.join(model_names) +
' (default: resnet18)')
parser.add_argument('-j', '--workers', default=4, type=int, metavar='N',
help='number of data loading workers (default: 4)')
parser.add_argument('--epochs', default=90, type=int, metavar='N',
help='number of total epochs to run')
parser.add_argument('--start-epoch', default=0, type=int, metavar='N',
help='manual epoch number (useful on restarts)')
parser.add_argument('-b', '--batch-size', default=96, type=int,
metavar='N',
help='mini-batch size (default: 256), this is the total '
'batch size of all GPUs on the current node when '
'using Data Parallel or Distributed Data Parallel')
parser.add_argument('--lr', '--learning-rate', default=0.01, type=float,
metavar='LR', help='initial learning rate', dest='lr')
parser.add_argument('--momentum', default=0.9, type=float, metavar='M',
help='momentum')
parser.add_argument('--wd', '--weight-decay', default=1e-4, type=float,
metavar='W', help='weight decay (default: 1e-4)',
dest='weight_decay')
parser.add_argument('-p', '--print-freq', default=10, type=int,
metavar='N', help='print frequency (default: 10)')
parser.add_argument('--resume', default='', type=str, metavar='PATH',
help='path to latest checkpoint (default: none)')
parser.add_argument('-e', '--evaluate', dest='evaluate', action='store_true',
help='evaluate model on validation set')
parser.add_argument('--pretrained', dest='pretrained', action='store_true',
help='use pre-trained model')
parser.add_argument('--world-size', default=-1, type=int,
help='number of nodes for distributed training')
parser.add_argument('--rank', default=-1, type=int,
help='node rank for distributed training')
parser.add_argument('--dist-url', default='tcp://224.66.41.62:23456', type=str,
help='url used to set up distributed training')
parser.add_argument('--backend', default='gloo', type=str,
help='distributed backend')
parser.add_argument('--seed', default=None, type=int,
help='seed for initializing training. ')
parser.add_argument('--gpu', default=None, type=int,
help='GPU id to use.')
parser.add_argument('--multiprocessing-distributed', action='store_true',
help='Use multi-processing distributed training to launch '
'N processes per node, which has N GPUs. This is the '
'fastest way to use PyTorch for either single node or '
'multi node data parallel training')
parser.add_argument("--local_rank", type=int)
parser.add_argument('--no-cuda',action='store_true',default=False,help='disable cuda')
parser.add_argument('--nproc-per-node',default=4,type=int, help='nproc_per_node')
global best_acc1, args
best_acc1 = 0
args = parser.parse_args()
def main():
global best_acc1, args
local_rank = args.local_rank
if args.seed is not None:
random.seed(args.seed)
torch.manual_seed(args.seed)
cudnn.deterministic = True
warnings.warn('You have chosen to seed training. '
'This will turn on the CUDNN deterministic setting, '
'which can slow down your training considerably! '
'You may see unexpected behavior when restarting '
'from checkpoints.')
use_cuda = not args.no_cuda and torch.cuda.is_available()
gpu = "cuda:{}".format(args.local_rank)
device = torch.device(gpu if use_cuda else "cpu")
print("=> using",device)
print("From Node:",torch.distributed.get_rank(),"The Local Rank:",local_rank,'\n')
# create model
if args.pretrained:
print("=> using pre-trained model '{}'".format(args.arch))
model = models.__dict__[args.arch]()
if args.gpu is None:
pre = torch.load('./pretrained/inception_v3_google-1a9a5a14.pth', map_location=lambda storage, loc: storage)
else:
loc = 'cuda:{}'.format(args.gpu)
pre = torch.load('./pretrained/inception_v3_google-1a9a5a14.pth', map_location=loc)
model.load_state_dict(pre)
#model.aux_logits = False
#model = Incepv3.InceptionV3Net(pretrained=args.pretrained)
else:
print("=> creating model '{}'".format(args.arch))
model = models.__dict__[args.arch]()
#model.aux_logits = False
#model = Incepv3.InceptionV3Net(pretrained=args.pretrained)
# optionally resume from a checkpoint
if args.resume:
if os.path.isfile(args.resume):
print("=> loading checkpoint '{}'".format(args.resume))
if args.gpu is None:
checkpoint = torch.load(args.resume)
else:
# Map model to be loaded to specified single gpu.
loc = 'cuda:{}'.format(args.gpu)
checkpoint = torch.load(args.resume, map_location=loc)
args.start_epoch = checkpoint['epoch']
best_acc1 = checkpoint['best_acc1']
if args.gpu is not None:
# best_acc1 may be from a checkpoint from a different GPU
best_acc1 = best_acc1.to(args.gpu)
model.load_state_dict(checkpoint['state_dict'])
optimizer.load_state_dict(checkpoint['optimizer'])
print("=> loaded checkpoint '{}' (epoch {})"
.format(args.resume, checkpoint['epoch']))
else:
print("=> no checkpoint found at '{}'".format(args.resume))
cudnn.benchmark = True
# Load model
model.to(device)
model = torch.nn.parallel.DistributedDataParallel(model, device_ids=[args.local_rank], find_unused_parameters=True)
criterion = nn.CrossEntropyLoss().to(device)
#ptimizer = torch.optim.SGD(model.parameters(), args.lr,momentum=args.momentum,weight_decay=args.weight_decay)
optimizer = torch.optim.RMSprop(model.parameters(), lr=args.lr, alpha=0.9, momentum=args.momentum, eps=1.0, weight_decay=args.weight_decay)
# Data loading code
input_size = 299
traindir = os.path.join(args.data, 'train')
valdir = os.path.join(args.data, 'val')
normalize = transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
train_dataset = datasets.ImageFolder(
traindir,
transforms.Compose([
transforms.RandomResizedCrop(input_size),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
normalize,
]))
train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset)
train_loader = torch.utils.data.DataLoader(
train_dataset, batch_size=args.batch_size, shuffle=(train_sampler is None),
num_workers=args.workers, pin_memory=True, sampler=train_sampler)
val_loader = torch.utils.data.DataLoader(
datasets.ImageFolder(valdir, transforms.Compose([
transforms.Resize(input_size),
transforms.CenterCrop(input_size),
transforms.ToTensor(),
normalize,
])),
batch_size=args.batch_size, shuffle=False,
num_workers=args.workers, pin_memory=True)
for epoch in range(args.start_epoch, args.epochs):
train_sampler.set_epoch(epoch)
adjust_learning_rate(optimizer, epoch, args)
# train for one epoch
train(train_loader, model, criterion, optimizer, epoch, args, device, True)
# evaluate on validation set
acc1 = validate(val_loader, model, criterion, args, device, False)
# remember best acc@1 and save checkpoint
is_best = acc1 > best_acc1
best_acc1 = max(acc1, best_acc1)
if not args.multiprocessing_distributed or (args.multiprocessing_distributed
and args.rank % args.nproc_per_node == 0):
save_checkpoint({
'epoch': epoch + 1,
'arch': args.arch,
'state_dict': model.state_dict(),
'best_acc1': best_acc1,
'optimizer' : optimizer.state_dict(),
}, is_best)
def train(train_loader, model, criterion, optimizer, epoch, args, device, is_inception=False):
batch_time = AverageMeter('Time', ':6.3f')
data_time = AverageMeter('Data', ':6.3f')
losses = AverageMeter('Loss', ':.4e')
top1 = AverageMeter('Acc@1', ':6.2f')
top5 = AverageMeter('Acc@5', ':6.2f')
progress = ProgressMeter(
len(train_loader),
[batch_time, data_time, losses, top1, top5],
prefix="Epoch: [{}]".format(epoch))
# switch to train mode
model.train()
end = time.time()
for i, (images, target) in enumerate(train_loader):
# measure data loading time
data_time.update(time.time() - end)
images, target = images.to(device, non_blocking=True), target.to(device, non_blocking=True)
# compute output
if is_inception:
output, aux_output = model(images)
loss1 = criterion(output,target)
loss2 = criterion(aux_output,target)
loss = loss1 + 0.4 * loss2
else:
output = model(images)
loss = criterion(output, target)
# measure accuracy and record loss
acc1, acc5 = accuracy(output, target, topk=(1, 5))
losses.update(loss.item(), images.size(0))
top1.update(acc1[0], images.size(0))
top5.update(acc5[0], images.size(0))
# compute gradient and do SGD step
optimizer.zero_grad()
loss.backward()
optimizer.step()
# measure elapsed time
batch_time.update(time.time() - end)
end = time.time()
if i % args.print_freq == 0:
progress.display(i)
def validate(val_loader, model, criterion, args, device, is_inception=False):
batch_time = AverageMeter('Time', ':6.3f')
losses = AverageMeter('Loss', ':.4e')
top1 = AverageMeter('Acc@1', ':6.2f')
top5 = AverageMeter('Acc@5', ':6.2f')
progress = ProgressMeter(
len(val_loader),
[batch_time, losses, top1, top5],
prefix='Test: ')
# switch to evaluate mode
model.eval()
with torch.no_grad():
end = time.time()
for i, (images, target) in enumerate(val_loader):
images, target = images.to(device, non_blocking=True), target.to(device, non_blocking=True)
# compute output
if is_inception:
output, aux_output = model(images)
loss1 = criterion(output, target)
loss2 = criterion(aux_output, target)
loss = loss1 + 0.4 * loss2
else:
output = model(images)
loss = criterion(output, target)
# measure accuracy and record loss
acc1, acc5 = accuracy(output, target, topk=(1, 5))
losses.update(loss.item(), images.size(0))
top1.update(acc1[0], images.size(0))
top5.update(acc5[0], images.size(0))
# measure elapsed time
batch_time.update(time.time() - end)
end = time.time()
if i % args.print_freq == 0:
progress.display(i)
# TODO: this should also be done with the ProgressMeter
print(' * Acc@1 {top1.avg:.3f} Acc@5 {top5.avg:.3f}'
.format(top1=top1, top5=top5))
return top1.avg
def save_checkpoint(state, is_best, filename='checkpoint.pth.tar'):
torch.save(state, filename)
if is_best:
shutil.copyfile(filename, 'model_best.pth.tar')
class AverageMeter(object):
"""Computes and stores the average and current value"""
def __init__(self, name, fmt=':f'):
self.name = name
self.fmt = fmt
self.reset()
def reset(self):
self.val = 0
self.avg = 0
self.sum = 0
self.count = 0
def update(self, val, n=1):
self.val = val
self.sum += val * n
self.count += n
self.avg = self.sum / self.count
def __str__(self):
fmtstr = '{name} {val' + self.fmt + '} ({avg' + self.fmt + '})'
return fmtstr.format(**self.__dict__)
class ProgressMeter(object):
def __init__(self, num_batches, meters, prefix=""):
self.batch_fmtstr = self._get_batch_fmtstr(num_batches)
self.meters = meters
self.prefix = prefix
def display(self, batch):
entries = [self.prefix + self.batch_fmtstr.format(batch)]
entries += [str(meter) for meter in self.meters]
print('\t'.join(entries))
def _get_batch_fmtstr(self, num_batches):
num_digits = len(str(num_batches // 1))
fmt = '{:' + str(num_digits) + 'd}'
return '[' + fmt + '/' + fmt.format(num_batches) + ']'
def adjust_learning_rate(optimizer, epoch, args):
"""Sets the learning rate to the initial LR decayed by 10 every 30 epochs"""
lr = args.lr * (0.1 ** (epoch // 30))
for param_group in optimizer.param_groups:
param_group['lr'] = lr
def accuracy(output, target, topk=(1,)):
"""Computes the accuracy over the k top predictions for the specified values of k"""
with torch.no_grad():
maxk = max(topk)
batch_size = target.size(0)
_, pred = output.topk(maxk, 1, True, True)
pred = pred.t()
correct = pred.eq(target.view(1, -1).expand_as(pred))
res = []
for k in topk:
correct_k = correct[:k].reshape(-1).float().sum(0, keepdim=True)
res.append(correct_k.mul_(100.0 / batch_size))
return res
if __name__ == '__main__':
print('Use {back} as backend.'.format(back=args.backend))
dist.init_process_group(backend=args.backend, init_method='env://', timeout=datetime.timedelta(seconds=1000))
main()