I managed to get my own GDAS code implementation up and running.
However, the loss stay the same which indicates the training process is still incorrect.
Could anyone advise ?
I managed to get my own GDAS code implementation up and running.
However, the loss stay the same which indicates the training process is still incorrect.
Could anyone advise ?
Check, if all parameters get valid gradients after the first backward call via:
for param in model.parameters():
print(param.grad)
to make sure the computation graph isn’t detached.
If you are seeing valid tensors using the code snippet (and not None), the gradients are at least properly computed and you could then check the, if the optimizer is indeed updating them.
Once this is done (and everything looks good), try to overfit a small dataset (e.g. just 10 samples) by playing around with some hyperparameters.
I am seeing None for all epoch runs. Where exactly did I code wrongly ?
This would mean the computation graph was detached by e.g. calling item() on a tensor, rewrapping a tensor in another tensor, using a 3rd party library (such as numpy) without using a custom autograd.Function etc.
You could narrow it down by checking the .grad_fn of each intermediate output of each layer in the forward of your model and check where it gets detached.
I used .detach() in gdas/gdas.py at main · promach/gdas · GitHub
self.chosen_edge = np.argmax(gumbel.detach().numpy(), axis=0) # converts one-hot encoding into integer
How do I get around without using detach() ?
I’m not familiar with your use case, but note that even without detaching the tensor, argmax would detach the output, as this operation is not differentiable.
I disabled the use of argmax() , but I am still seeing same training loss.
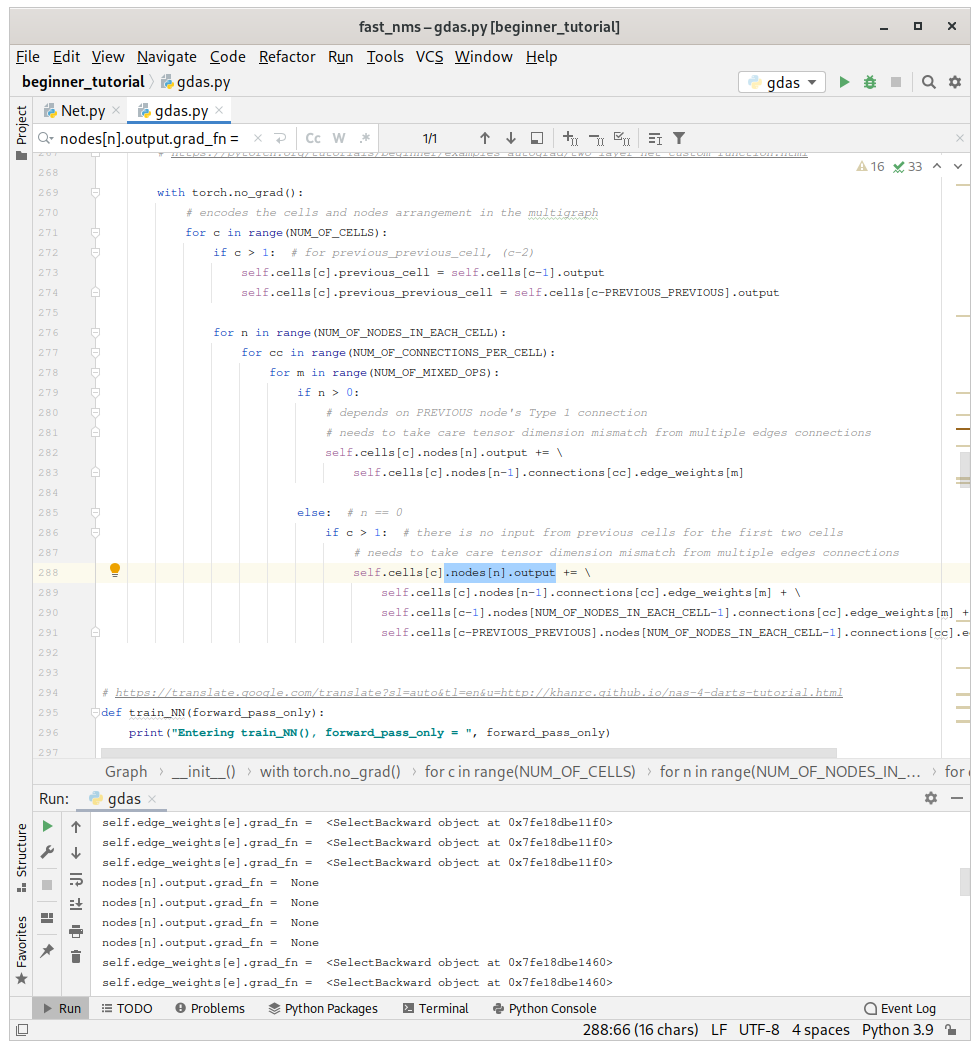
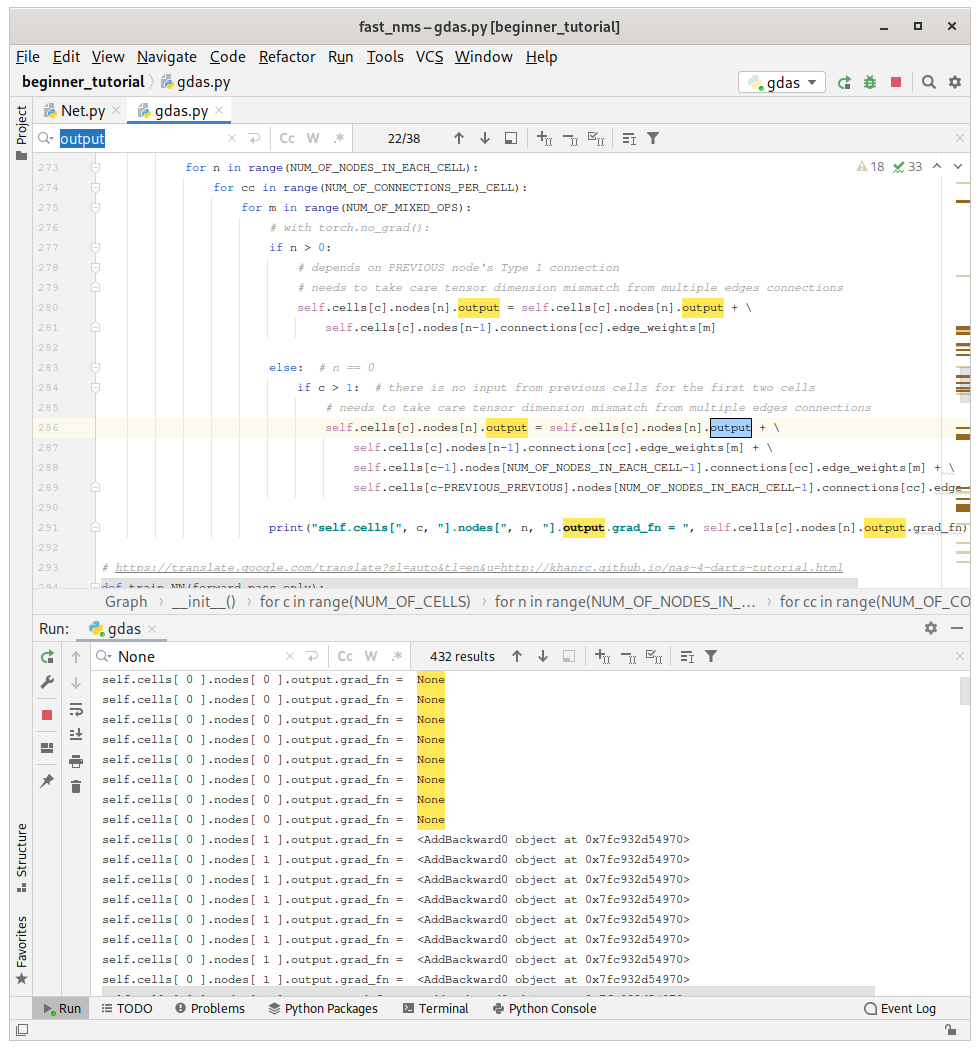
So, I put a line: print("nodes[n].output.grad_fn = ", self.nodes[n].output.grad_fn) after gdas/gdas.py at main · promach/gdas · GitHub to check.
However, this .grad_fn returns None as well.
I tried to debug further by adding requires_grad=True to some of the variables, but .grad_fn still returns None
# https://github.com/D-X-Y/AutoDL-Projects/issues/99
import torch
import torch.utils.data
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
# import numpy as np
USE_CUDA = torch.cuda.is_available()
# https://arxiv.org/pdf/1806.09055.pdf#page=12
TEST_DATASET_RATIO = 0.5 # 50 percent of the dataset is dedicated for testing purpose
BATCH_SIZE = 4
NUM_OF_IMAGE_CHANNELS = 3 # RGB
IMAGE_HEIGHT = 32
IMAGE_WIDTH = 32
NUM_OF_IMAGE_CLASSES = 10
SIZE_OF_HIDDEN_LAYERS = 64
NUM_EPOCHS = 1
LEARNING_RATE = 0.025
MOMENTUM = 0.9
NUM_OF_CELLS = 8
NUM_OF_MIXED_OPS = 4
NUM_OF_PREVIOUS_CELLS_OUTPUTS = 2 # last_cell_output , second_last_cell_output
NUM_OF_NODES_IN_EACH_CELL = 4
NUM_OF_CONNECTIONS_PER_CELL = NUM_OF_PREVIOUS_CELLS_OUTPUTS + NUM_OF_NODES_IN_EACH_CELL
NUM_OF_CHANNELS = 16
INTERVAL_BETWEEN_REDUCTION_CELLS = 3
PREVIOUS_PREVIOUS = 2 # (n-2)
REDUCTION_STRIDE = 2
NORMAL_STRIDE = 1
TAU_GUMBEL = 0.5
EDGE_WEIGHTS_NETWORK_IN_SIZE = 5
EDGE_WEIGHTS_NETWORK_OUT_SIZE = 2
# https://pytorch.org/tutorials/beginner/blitz/cifar10_tutorial.html
transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
trainset = torchvision.datasets.CIFAR10(root='./data', train=True,
download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=BATCH_SIZE,
shuffle=True, num_workers=2)
valset = torchvision.datasets.CIFAR10(root='./data', train=False,
download=True, transform=transform)
valloader = torch.utils.data.DataLoader(valset, batch_size=BATCH_SIZE,
shuffle=False, num_workers=2)
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
TRAIN_BATCH_SIZE = int(len(trainset) * (1 - TEST_DATASET_RATIO))
# https://discordapp.com/channels/687504710118146232/703298739732873296/853270183649083433
# for training for edge weights as well as internal NN function weights
class Edge(nn.Module):
def __init__(self):
super(Edge, self).__init__()
# https://stackoverflow.com/a/51027227/8776167
# self.linear = nn.Linear(EDGE_WEIGHTS_NETWORK_IN_SIZE, EDGE_WEIGHTS_NETWORK_OUT_SIZE)
# https://pytorch.org/docs/stable/generated/torch.nn.parameter.Parameter.html
self.weights = nn.Parameter(torch.zeros(1),
requires_grad=True) # for edge weights, not for internal NN function weights
def __freeze_w(self):
self.weights.requires_grad = False
def __unfreeze_w(self):
self.weights.requires_grad = True
def __freeze_f(self):
for param in self.f.parameters():
param.requires_grad = False
def __unfreeze_f(self):
for param in self.f.parameters():
param.requires_grad = True
# for NN functions internal weights training
def forward_f(self, x):
self.__unfreeze_f()
self.__freeze_w()
# inheritance in python classes and SOLID principles
# https://en.wikipedia.org/wiki/SOLID
# https://blog.cleancoder.com/uncle-bob/2020/10/18/Solid-Relevance.html
return self.f(x)
# self-defined initial NAS architecture, for supernet architecture edge weight training
def forward_edge(self, x):
self.__freeze_f()
self.__unfreeze_w()
return x * self.weights
class ConvEdge(Edge):
def __init__(self, stride):
super().__init__()
self.f = nn.Conv2d(in_channels=3, out_channels=3, kernel_size=(3, 3), stride=(stride, stride), padding=1)
class LinearEdge(Edge):
def __init__(self):
super().__init__()
self.f = nn.Linear(84, 10)
class MaxPoolEdge(Edge):
def __init__(self, stride):
super().__init__()
self.f = nn.MaxPool2d(kernel_size=3, stride=stride, padding=1, ceil_mode=True)
class AvgPoolEdge(Edge):
def __init__(self, stride):
super().__init__()
self.f = nn.AvgPool2d(kernel_size=3, stride=stride, padding=1, ceil_mode=True)
class Skip(nn.Module):
def forward(self, x):
return x
class SkipEdge(Edge):
def __init__(self):
super().__init__()
self.f = Skip()
# to collect and manage different edges between 2 nodes
class Connection(nn.Module):
def __init__(self, stride):
super(Connection, self).__init__()
if USE_CUDA:
# creates distinct edges and references each of them in a list (self.edges)
# self.linear_edge = LinearEdge().cuda()
self.conv2d_edge = ConvEdge(stride).cuda()
self.maxpool_edge = MaxPoolEdge(stride).cuda()
self.avgpool_edge = AvgPoolEdge(stride).cuda()
self.skip_edge = SkipEdge().cuda()
else:
# creates distinct edges and references each of them in a list (self.edges)
# self.linear_edge = LinearEdge()
self.conv2d_edge = ConvEdge(stride)
self.maxpool_edge = MaxPoolEdge(stride)
self.avgpool_edge = AvgPoolEdge(stride)
self.skip_edge = SkipEdge()
self.edges = [self.conv2d_edge, self.maxpool_edge, self.avgpool_edge, self.skip_edge]
self.edge_weights = torch.zeros(NUM_OF_MIXED_OPS, requires_grad=True)
# for approximate architecture gradient
self.f_weights = [None] * NUM_OF_MIXED_OPS
self.f_weights_backup = [None] * NUM_OF_MIXED_OPS
self.weight_plus = torch.zeros(NUM_OF_MIXED_OPS, requires_grad=True)
self.weight_minus = torch.zeros(NUM_OF_MIXED_OPS, requires_grad=True)
# use linear transformation (weighted summation) to combine results from different edges
self.combined_feature_map = torch.zeros([BATCH_SIZE, NUM_OF_IMAGE_CHANNELS, IMAGE_HEIGHT, IMAGE_WIDTH],
requires_grad=True)
if USE_CUDA:
self.combined_feature_map = self.combined_feature_map.cuda()
for e in range(NUM_OF_MIXED_OPS):
with torch.no_grad():
self.edge_weights[e] = self.edges[e].weights
print("self.edge_weights[e].grad_fn = ", self.edge_weights[e].grad_fn)
# https://stackoverflow.com/a/45024500/8776167 extracts the weights learned through NN functions
# self.f_weights[e] = list(self.edges[e].parameters())
# Refer to GDAS equations (5) and (6)
# if one_hot is already there, would summation be required given that all other entries are forced to 0 ?
# It's not required, but you don't know, which index is one hot encoded 1.
# https://pytorch.org/docs/stable/nn.functional.html#gumbel-softmax
gumbel = F.gumbel_softmax(self.edge_weights, tau=TAU_GUMBEL, hard=True)
self.chosen_edge = torch.argmax(gumbel, dim=0) # converts one-hot encoding into integer
# to collect and manage multiple different connections between a particular node and its neighbouring nodes
class Node(nn.Module):
def __init__(self, stride):
super(Node, self).__init__()
# two types of output connections
# Type 1: (multiple edges) output connects to the input of the other intermediate nodes
# Type 2: (single edge) output connects directly to the final output node
# Type 1
self.connections = nn.ModuleList([Connection(stride) for i in range(NUM_OF_CONNECTIONS_PER_CELL)])
# Type 2
# depends on PREVIOUS node's Type 1 output
self.output = torch.zeros(NUM_OF_IMAGE_CLASSES, requires_grad=True) # for initialization
# to manage all nodes within a cell
class Cell(nn.Module):
def __init__(self, stride):
super(Cell, self).__init__()
# all the coloured edges inside
# https://user-images.githubusercontent.com/3324659/117573177-20ea9a80-b109-11eb-9418-16e22e684164.png
# A single cell contains 'NUM_OF_NODES_IN_EACH_CELL' distinct nodes
# for the k-th node, we have (k+1) preceding nodes.
# Each intermediate state, 0->3 ('NUM_OF_NODES_IN_EACH_CELL-1'),
# is connected to each previous intermediate state
# as well as the output of the previous two cells, c_{k-2} and c_{k-1} (after a preprocessing layer).
# previous_previous_cell_output = c_{k-2}
# previous_cell_output = c{k-1}
self.nodes = nn.ModuleList([Node(stride) for i in range(NUM_OF_NODES_IN_EACH_CELL)])
# just for variables initialization
self.previous_cell = 0
self.previous_previous_cell = 0
self.output = torch.zeros(NUM_OF_NODES_IN_EACH_CELL, NUM_OF_IMAGE_CLASSES, requires_grad=True)
for n in range(NUM_OF_NODES_IN_EACH_CELL):
# 'add' then 'concat' feature maps from different nodes
# needs to take care of tensor dimension mismatch
# See https://github.com/D-X-Y/AutoDL-Projects/issues/99#issuecomment-869100416
with torch.no_grad():
self.output += self.nodes[n].output
print("nodes[n].output.grad_fn = ", self.nodes[n].output.grad_fn)
# to manage all nodes
class Graph(nn.Module):
def __init__(self):
super(Graph, self).__init__()
stride = 0 # just to initialize a variable
for i in range(NUM_OF_CELLS):
if i % INTERVAL_BETWEEN_REDUCTION_CELLS == 0:
stride = REDUCTION_STRIDE # to emulate reduction cell by using normal cell with stride=2
else:
stride = NORMAL_STRIDE # normal cell
self.cells = nn.ModuleList([Cell(stride) for i in range(NUM_OF_CELLS)])
# https://www.reddit.com/r/learnpython/comments/no7btk/how_to_carry_extra_information_across_dag/
# https://docs.python.org/3/tutorial/datastructures.html
# generates a supernet consisting of 'NUM_OF_CELLS' cells
# each cell contains of 'NUM_OF_NODES_IN_EACH_CELL' nodes
# refer to PNASNet https://arxiv.org/pdf/1712.00559.pdf#page=5 for the cell arrangement
# https://pytorch.org/tutorials/beginner/examples_autograd/two_layer_net_custom_function.html
with torch.no_grad():
# encodes the cells and nodes arrangement in the multigraph
for c in range(NUM_OF_CELLS):
if c > 1: # for previous_previous_cell, (c-2)
self.cells[c].previous_cell = self.cells[c-1].output
self.cells[c].previous_previous_cell = self.cells[c-PREVIOUS_PREVIOUS].output
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
for m in range(NUM_OF_MIXED_OPS):
if n > 0:
# depends on PREVIOUS node's Type 1 connection
# needs to take care tensor dimension mismatch from multiple edges connections
self.cells[c].nodes[n].output += \
self.cells[c].nodes[n-1].connections[cc].edge_weights[m]
else: # n == 0
if c > 1: # there is no input from previous cells for the first two cells
# needs to take care tensor dimension mismatch from multiple edges connections
self.cells[c].nodes[n].output += \
self.cells[c].nodes[n-1].connections[cc].edge_weights[m] + \
self.cells[c-1].nodes[NUM_OF_NODES_IN_EACH_CELL-1].connections[cc].edge_weights[m] + \
self.cells[c-PREVIOUS_PREVIOUS].nodes[NUM_OF_NODES_IN_EACH_CELL-1].connections[cc].edge_weights[m]
# https://translate.google.com/translate?sl=auto&tl=en&u=http://khanrc.github.io/nas-4-darts-tutorial.html
def train_NN(forward_pass_only):
print("Entering train_NN(), forward_pass_only = ", forward_pass_only)
graph = Graph()
# for param in graph.parameters():
# print(param.grad)
if USE_CUDA:
graph = graph.cuda()
criterion = nn.CrossEntropyLoss()
optimizer1 = optim.SGD(graph.parameters(), lr=LEARNING_RATE, momentum=MOMENTUM)
# just for initialization, no special meaning
Ltrain = 0
train_inputs = 0
train_labels = 0
if forward_pass_only == 0:
# do train thing for architecture edge weights
graph.train()
# zero the parameter gradients
optimizer1.zero_grad()
print("before multiple for-loops")
for train_data, val_data in (zip(trainloader, valloader)):
train_inputs, train_labels = train_data
# val_inputs, val_labels = val_data
if USE_CUDA:
train_inputs = train_inputs.cuda()
train_labels = train_labels.cuda()
for epoch in range(NUM_EPOCHS):
# forward pass
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
for e in range(NUM_OF_MIXED_OPS):
if c == 0:
x = train_inputs
else:
# Uses feature map output from previous neighbour node for further processing
x = graph.cells[c].nodes[n-1].connections[cc].combined_feature_map
if USE_CUDA:
x = x.cuda()
# combines all the feature maps from different mixed ops edges
graph.cells[c].nodes[n].connections[cc].combined_feature_map += \
graph.cells[c].nodes[n].connections[cc].edges[e].forward_edge(x) # Ltrain(w±, alpha)
outputs1 = graph.cells[NUM_OF_CELLS-1].output
if USE_CUDA:
outputs1 = outputs1.cuda()
Ltrain = criterion(outputs1, train_labels)
if forward_pass_only == 0:
# backward pass
Ltrain = Ltrain.requires_grad_()
Ltrain.backward()
optimizer1.step()
else:
# no need to save model parameters for next epoch
return Ltrain
# DARTS's approximate architecture gradient. Refer to equation (8)
# needs to save intermediate trained model for Ltrain
path = './model.pth'
torch.save(graph, path)
print("after multiple for-loops")
return Ltrain
def train_architecture(forward_pass_only, train_or_val='val'):
print("Entering train_architecture(), forward_pass_only = ", forward_pass_only, " , train_or_val = ", train_or_val)
graph = Graph()
# for param in graph.parameters():
# print(param.grad)
if USE_CUDA:
graph = graph.cuda()
criterion = nn.CrossEntropyLoss()
optimizer2 = optim.SGD(graph.parameters(), lr=LEARNING_RATE, momentum=MOMENTUM)
# just for initialization, no special meaning
Lval = 0
train_inputs = 0
train_labels = 0
val_inputs = 0
val_labels = 0
if forward_pass_only == 0:
# do train thing for internal NN function weights
graph.train()
# zero the parameter gradients
optimizer2.zero_grad()
print("before multiple for-loops")
for train_data, val_data in (zip(trainloader, valloader)):
train_inputs, train_labels = train_data
val_inputs, val_labels = val_data
if USE_CUDA:
train_inputs = train_inputs.cuda()
train_labels = train_labels.cuda()
val_inputs = val_inputs.cuda()
val_labels = val_labels.cuda()
for epoch in range(NUM_EPOCHS):
# forward pass
# use linear transformation ('weighted sum then concat') to combine results from different nodes
# into an output feature map to be fed into the next neighbour node for further processing
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
for e in range(NUM_OF_MIXED_OPS):
x = 0 # depends on the input tensor dimension requirement
if c == 0:
if train_or_val == 'val':
x = val_inputs
else:
x = train_inputs
else:
# Uses feature map output from previous neighbour node for further processing
x = graph.cells[c].nodes[n-1].connections[cc].combined_feature_map
# need to take care of tensors dimension mismatch
graph.cells[c].nodes[n].connections[cc].combined_feature_map += \
graph.cells[c].nodes[n].connections[cc].edge_weights[e] * \
graph.cells[c].nodes[n].connections[cc].edges[e].forward_f(x) # Lval(w*, alpha)
outputs2 = graph.cells[NUM_OF_CELLS-1].output
if USE_CUDA:
outputs2 = outputs2.cuda()
if train_or_val == 'val':
loss = criterion(outputs2, val_labels)
else:
loss = criterion(outputs2, train_labels)
if forward_pass_only == 0:
# backward pass
Lval = loss
Lval = Lval.requires_grad_()
Lval.backward()
optimizer2.step()
else:
# no need to save model parameters for next epoch
return loss
# DARTS's approximate architecture gradient. Refer to equation (8)
# needs to save intermediate trained model for Lval
path = './model.pth'
torch.save(graph, path)
sigma = LEARNING_RATE
epsilon = 0.01 / torch.norm(Lval)
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
CC = graph.cells[c].nodes[n].connections[cc]
for e in range(NUM_OF_MIXED_OPS):
for w in graph.cells[c].nodes[n].connections[cc].edges[e].f.parameters():
# https://mythrex.github.io/math_behind_darts/
# Finite Difference Method
CC.weight_plus = w + epsilon * Lval
CC.weight_minus = w - epsilon * Lval
# Backups original f_weights
CC.f_weights_backup = w
# replaces f_weights with weight_plus before NN training
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
CC = graph.cells[c].nodes[n].connections[cc]
for e in range(NUM_OF_MIXED_OPS):
for w in graph.cells[c].nodes[n].connections[cc].edges[e].f.parameters():
w = CC.weight_plus
# test NN to obtain loss
Ltrain_plus = train_architecture(forward_pass_only=1, train_or_val='train')
# replaces f_weights with weight_minus before NN training
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
CC = graph.cells[c].nodes[n].connections[cc]
for e in range(NUM_OF_MIXED_OPS):
for w in graph.cells[c].nodes[n].connections[cc].edges[e].f.parameters():
w = CC.weight_minus
# test NN to obtain loss
Ltrain_minus = train_architecture(forward_pass_only=1, train_or_val='train')
# Restores original f_weights
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
CC = graph.cells[c].nodes[n].connections[cc]
for e in range(NUM_OF_MIXED_OPS):
for w in graph.cells[c].nodes[n].connections[cc].edges[e].f.parameters():
w = CC.f_weights_backup
print("after multiple for-loops")
L2train_Lval = (Ltrain_plus - Ltrain_minus) / (2 * epsilon)
return Lval - L2train_Lval
if __name__ == "__main__":
run_num = 0
not_converged = 1
while not_converged:
print("run_num = ", run_num)
ltrain = train_NN(forward_pass_only=0)
print("Finished train_NN()")
# 'train_or_val' to differentiate between using training dataset and validation dataset
lval = train_architecture(forward_pass_only=0, train_or_val='val')
print("Finished train_architecture()")
print("lval = ", lval, " , ltrain = ", ltrain)
not_converged = (lval > 0.01) or (ltrain > 0.01)
run_num = run_num + 1
# do test thing
I would not add .requires_grad = True randomly to the code, as it won’t fix the issue, but could mask it instead, so I would stick to the previously mentioned debugging: check the .grad_fn of all intermediates starting at the beginning of the model (i.e. the output of the first layer) and check, which activation shows .grad_fn = None. To do so you can either check it manually in the forward of each module or use forward hooks.
edge_weights has no issue with .grad_fn , but I am not sure why nodes[n].output still have issue with grad_fn ?
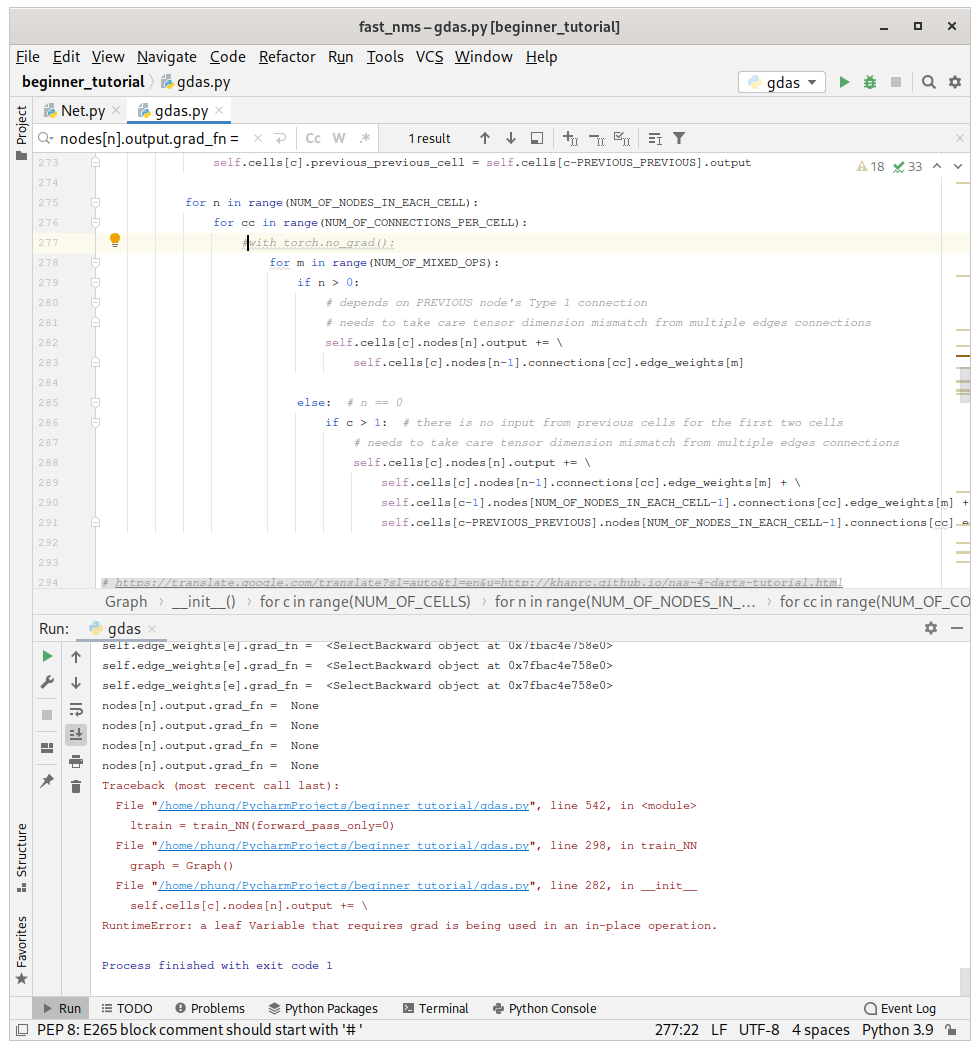
The screenshot shows that you are executing this code snippet in a with torch.no_grad() guard, so I assume it’s expected and you explicitly don’t want to track these operations.
If I remove with torch.no_grad() , then the following runtime error would occur.
RuntimeError: a leaf Variable that requires grad is being used in an in-place operation.
In that case remove the in-place operations and replace them with the out of place equivalents.
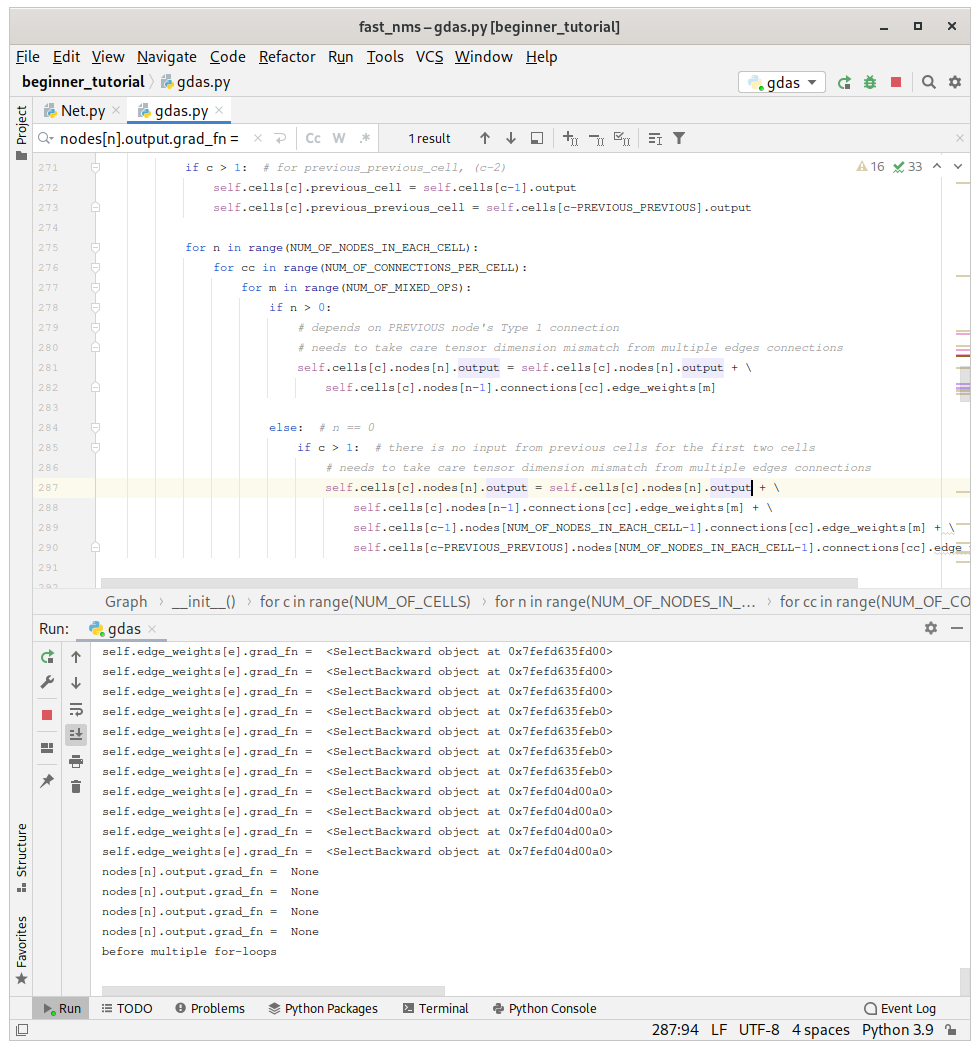
It is now using out of place equivalents.
However, the code still give nodes[n].output.grad_fn = None
# https://github.com/D-X-Y/AutoDL-Projects/issues/99
import torch
import torch.utils.data
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
# import numpy as np
USE_CUDA = torch.cuda.is_available()
# https://arxiv.org/pdf/1806.09055.pdf#page=12
TEST_DATASET_RATIO = 0.5 # 50 percent of the dataset is dedicated for testing purpose
BATCH_SIZE = 4
NUM_OF_IMAGE_CHANNELS = 3 # RGB
IMAGE_HEIGHT = 32
IMAGE_WIDTH = 32
NUM_OF_IMAGE_CLASSES = 10
SIZE_OF_HIDDEN_LAYERS = 64
NUM_EPOCHS = 1
LEARNING_RATE = 0.025
MOMENTUM = 0.9
NUM_OF_CELLS = 8
NUM_OF_MIXED_OPS = 4
NUM_OF_PREVIOUS_CELLS_OUTPUTS = 2 # last_cell_output , second_last_cell_output
NUM_OF_NODES_IN_EACH_CELL = 4
NUM_OF_CONNECTIONS_PER_CELL = NUM_OF_PREVIOUS_CELLS_OUTPUTS + NUM_OF_NODES_IN_EACH_CELL
NUM_OF_CHANNELS = 16
INTERVAL_BETWEEN_REDUCTION_CELLS = 3
PREVIOUS_PREVIOUS = 2 # (n-2)
REDUCTION_STRIDE = 2
NORMAL_STRIDE = 1
TAU_GUMBEL = 0.5
EDGE_WEIGHTS_NETWORK_IN_SIZE = 5
EDGE_WEIGHTS_NETWORK_OUT_SIZE = 2
# https://pytorch.org/tutorials/beginner/blitz/cifar10_tutorial.html
transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
trainset = torchvision.datasets.CIFAR10(root='./data', train=True,
download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=BATCH_SIZE,
shuffle=True, num_workers=2)
valset = torchvision.datasets.CIFAR10(root='./data', train=False,
download=True, transform=transform)
valloader = torch.utils.data.DataLoader(valset, batch_size=BATCH_SIZE,
shuffle=False, num_workers=2)
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
TRAIN_BATCH_SIZE = int(len(trainset) * (1 - TEST_DATASET_RATIO))
# https://discordapp.com/channels/687504710118146232/703298739732873296/853270183649083433
# for training for edge weights as well as internal NN function weights
class Edge(nn.Module):
def __init__(self):
super(Edge, self).__init__()
# https://stackoverflow.com/a/51027227/8776167
# self.linear = nn.Linear(EDGE_WEIGHTS_NETWORK_IN_SIZE, EDGE_WEIGHTS_NETWORK_OUT_SIZE)
# https://pytorch.org/docs/stable/generated/torch.nn.parameter.Parameter.html
self.weights = nn.Parameter(torch.zeros(1),
requires_grad=True) # for edge weights, not for internal NN function weights
def __freeze_w(self):
self.weights.requires_grad = False
def __unfreeze_w(self):
self.weights.requires_grad = True
def __freeze_f(self):
for param in self.f.parameters():
param.requires_grad = False
def __unfreeze_f(self):
for param in self.f.parameters():
param.requires_grad = True
# for NN functions internal weights training
def forward_f(self, x):
self.__unfreeze_f()
self.__freeze_w()
# inheritance in python classes and SOLID principles
# https://en.wikipedia.org/wiki/SOLID
# https://blog.cleancoder.com/uncle-bob/2020/10/18/Solid-Relevance.html
return self.f(x)
# self-defined initial NAS architecture, for supernet architecture edge weight training
def forward_edge(self, x):
self.__freeze_f()
self.__unfreeze_w()
return x * self.weights
class ConvEdge(Edge):
def __init__(self, stride):
super().__init__()
self.f = nn.Conv2d(in_channels=3, out_channels=3, kernel_size=(3, 3), stride=(stride, stride), padding=1)
class LinearEdge(Edge):
def __init__(self):
super().__init__()
self.f = nn.Linear(84, 10)
class MaxPoolEdge(Edge):
def __init__(self, stride):
super().__init__()
self.f = nn.MaxPool2d(kernel_size=3, stride=stride, padding=1, ceil_mode=True)
class AvgPoolEdge(Edge):
def __init__(self, stride):
super().__init__()
self.f = nn.AvgPool2d(kernel_size=3, stride=stride, padding=1, ceil_mode=True)
class Skip(nn.Module):
def forward(self, x):
return x
class SkipEdge(Edge):
def __init__(self):
super().__init__()
self.f = Skip()
# to collect and manage different edges between 2 nodes
class Connection(nn.Module):
def __init__(self, stride):
super(Connection, self).__init__()
if USE_CUDA:
# creates distinct edges and references each of them in a list (self.edges)
# self.linear_edge = LinearEdge().cuda()
self.conv2d_edge = ConvEdge(stride).cuda()
self.maxpool_edge = MaxPoolEdge(stride).cuda()
self.avgpool_edge = AvgPoolEdge(stride).cuda()
self.skip_edge = SkipEdge().cuda()
else:
# creates distinct edges and references each of them in a list (self.edges)
# self.linear_edge = LinearEdge()
self.conv2d_edge = ConvEdge(stride)
self.maxpool_edge = MaxPoolEdge(stride)
self.avgpool_edge = AvgPoolEdge(stride)
self.skip_edge = SkipEdge()
self.edges = [self.conv2d_edge, self.maxpool_edge, self.avgpool_edge, self.skip_edge]
self.edge_weights = torch.zeros(NUM_OF_MIXED_OPS, requires_grad=True)
# for approximate architecture gradient
self.f_weights = [None] * NUM_OF_MIXED_OPS
self.f_weights_backup = [None] * NUM_OF_MIXED_OPS
self.weight_plus = torch.zeros(NUM_OF_MIXED_OPS, requires_grad=True)
self.weight_minus = torch.zeros(NUM_OF_MIXED_OPS, requires_grad=True)
# use linear transformation (weighted summation) to combine results from different edges
self.combined_feature_map = torch.zeros([BATCH_SIZE, NUM_OF_IMAGE_CHANNELS, IMAGE_HEIGHT, IMAGE_WIDTH],
requires_grad=True)
if USE_CUDA:
self.combined_feature_map = self.combined_feature_map.cuda()
for e in range(NUM_OF_MIXED_OPS):
with torch.no_grad():
self.edge_weights[e] = self.edges[e].weights
print("self.edge_weights[e].grad_fn = ", self.edge_weights[e].grad_fn)
# https://stackoverflow.com/a/45024500/8776167 extracts the weights learned through NN functions
# self.f_weights[e] = list(self.edges[e].parameters())
# Refer to GDAS equations (5) and (6)
# if one_hot is already there, would summation be required given that all other entries are forced to 0 ?
# It's not required, but you don't know, which index is one hot encoded 1.
# https://pytorch.org/docs/stable/nn.functional.html#gumbel-softmax
gumbel = F.gumbel_softmax(self.edge_weights, tau=TAU_GUMBEL, hard=True)
self.chosen_edge = torch.argmax(gumbel, dim=0) # converts one-hot encoding into integer
# to collect and manage multiple different connections between a particular node and its neighbouring nodes
class Node(nn.Module):
def __init__(self, stride):
super(Node, self).__init__()
# two types of output connections
# Type 1: (multiple edges) output connects to the input of the other intermediate nodes
# Type 2: (single edge) output connects directly to the final output node
# Type 1
self.connections = nn.ModuleList([Connection(stride) for i in range(NUM_OF_CONNECTIONS_PER_CELL)])
# Type 2
# depends on PREVIOUS node's Type 1 output
self.output = torch.zeros(NUM_OF_IMAGE_CLASSES, requires_grad=True) # for initialization
# to manage all nodes within a cell
class Cell(nn.Module):
def __init__(self, stride):
super(Cell, self).__init__()
# all the coloured edges inside
# https://user-images.githubusercontent.com/3324659/117573177-20ea9a80-b109-11eb-9418-16e22e684164.png
# A single cell contains 'NUM_OF_NODES_IN_EACH_CELL' distinct nodes
# for the k-th node, we have (k+1) preceding nodes.
# Each intermediate state, 0->3 ('NUM_OF_NODES_IN_EACH_CELL-1'),
# is connected to each previous intermediate state
# as well as the output of the previous two cells, c_{k-2} and c_{k-1} (after a preprocessing layer).
# previous_previous_cell_output = c_{k-2}
# previous_cell_output = c{k-1}
self.nodes = nn.ModuleList([Node(stride) for i in range(NUM_OF_NODES_IN_EACH_CELL)])
# just for variables initialization
self.previous_cell = 0
self.previous_previous_cell = 0
self.output = torch.zeros(NUM_OF_NODES_IN_EACH_CELL, NUM_OF_IMAGE_CLASSES, requires_grad=True)
for n in range(NUM_OF_NODES_IN_EACH_CELL):
# 'add' then 'concat' feature maps from different nodes
# needs to take care of tensor dimension mismatch
# See https://github.com/D-X-Y/AutoDL-Projects/issues/99#issuecomment-869100416
with torch.no_grad():
self.output += self.nodes[n].output
print("nodes[n].output.grad_fn = ", self.nodes[n].output.grad_fn)
# to manage all nodes
class Graph(nn.Module):
def __init__(self):
super(Graph, self).__init__()
stride = 0 # just to initialize a variable
for i in range(NUM_OF_CELLS):
if i % INTERVAL_BETWEEN_REDUCTION_CELLS == 0:
stride = REDUCTION_STRIDE # to emulate reduction cell by using normal cell with stride=2
else:
stride = NORMAL_STRIDE # normal cell
self.cells = nn.ModuleList([Cell(stride) for i in range(NUM_OF_CELLS)])
# https://www.reddit.com/r/learnpython/comments/no7btk/how_to_carry_extra_information_across_dag/
# https://docs.python.org/3/tutorial/datastructures.html
# generates a supernet consisting of 'NUM_OF_CELLS' cells
# each cell contains of 'NUM_OF_NODES_IN_EACH_CELL' nodes
# refer to PNASNet https://arxiv.org/pdf/1712.00559.pdf#page=5 for the cell arrangement
# https://pytorch.org/tutorials/beginner/examples_autograd/two_layer_net_custom_function.html
# encodes the cells and nodes arrangement in the multigraph
for c in range(NUM_OF_CELLS):
if c > 1: # for previous_previous_cell, (c-2)
self.cells[c].previous_cell = self.cells[c-1].output
self.cells[c].previous_previous_cell = self.cells[c-PREVIOUS_PREVIOUS].output
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
for m in range(NUM_OF_MIXED_OPS):
if n > 0:
# depends on PREVIOUS node's Type 1 connection
# needs to take care tensor dimension mismatch from multiple edges connections
self.cells[c].nodes[n].output = self.cells[c].nodes[n].output + \
self.cells[c].nodes[n-1].connections[cc].edge_weights[m]
else: # n == 0
if c > 1: # there is no input from previous cells for the first two cells
# needs to take care tensor dimension mismatch from multiple edges connections
self.cells[c].nodes[n].output = self.cells[c].nodes[n].output + \
self.cells[c].nodes[n-1].connections[cc].edge_weights[m] + \
self.cells[c-1].nodes[NUM_OF_NODES_IN_EACH_CELL-1].connections[cc].edge_weights[m] + \
self.cells[c-PREVIOUS_PREVIOUS].nodes[NUM_OF_NODES_IN_EACH_CELL-1].connections[cc].edge_weights[m]
# https://translate.google.com/translate?sl=auto&tl=en&u=http://khanrc.github.io/nas-4-darts-tutorial.html
def train_NN(forward_pass_only):
print("Entering train_NN(), forward_pass_only = ", forward_pass_only)
graph = Graph()
# for param in graph.parameters():
# print(param.grad)
if USE_CUDA:
graph = graph.cuda()
criterion = nn.CrossEntropyLoss()
optimizer1 = optim.SGD(graph.parameters(), lr=LEARNING_RATE, momentum=MOMENTUM)
# just for initialization, no special meaning
Ltrain = 0
train_inputs = 0
train_labels = 0
if forward_pass_only == 0:
# do train thing for architecture edge weights
graph.train()
# zero the parameter gradients
optimizer1.zero_grad()
print("before multiple for-loops")
for train_data, val_data in (zip(trainloader, valloader)):
train_inputs, train_labels = train_data
# val_inputs, val_labels = val_data
if USE_CUDA:
train_inputs = train_inputs.cuda()
train_labels = train_labels.cuda()
for epoch in range(NUM_EPOCHS):
# forward pass
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
for e in range(NUM_OF_MIXED_OPS):
if c == 0:
x = train_inputs
else:
# Uses feature map output from previous neighbour node for further processing
x = graph.cells[c].nodes[n-1].connections[cc].combined_feature_map
if USE_CUDA:
x = x.cuda()
# combines all the feature maps from different mixed ops edges
graph.cells[c].nodes[n].connections[cc].combined_feature_map += \
graph.cells[c].nodes[n].connections[cc].edges[e].forward_edge(x) # Ltrain(w±, alpha)
outputs1 = graph.cells[NUM_OF_CELLS-1].output
if USE_CUDA:
outputs1 = outputs1.cuda()
Ltrain = criterion(outputs1, train_labels)
if forward_pass_only == 0:
# backward pass
Ltrain = Ltrain.requires_grad_()
Ltrain.backward()
optimizer1.step()
else:
# no need to save model parameters for next epoch
return Ltrain
# DARTS's approximate architecture gradient. Refer to equation (8)
# needs to save intermediate trained model for Ltrain
path = './model.pth'
torch.save(graph, path)
print("after multiple for-loops")
return Ltrain
def train_architecture(forward_pass_only, train_or_val='val'):
print("Entering train_architecture(), forward_pass_only = ", forward_pass_only, " , train_or_val = ", train_or_val)
graph = Graph()
# for param in graph.parameters():
# print(param.grad)
if USE_CUDA:
graph = graph.cuda()
criterion = nn.CrossEntropyLoss()
optimizer2 = optim.SGD(graph.parameters(), lr=LEARNING_RATE, momentum=MOMENTUM)
# just for initialization, no special meaning
Lval = 0
train_inputs = 0
train_labels = 0
val_inputs = 0
val_labels = 0
if forward_pass_only == 0:
# do train thing for internal NN function weights
graph.train()
# zero the parameter gradients
optimizer2.zero_grad()
print("before multiple for-loops")
for train_data, val_data in (zip(trainloader, valloader)):
train_inputs, train_labels = train_data
val_inputs, val_labels = val_data
if USE_CUDA:
train_inputs = train_inputs.cuda()
train_labels = train_labels.cuda()
val_inputs = val_inputs.cuda()
val_labels = val_labels.cuda()
for epoch in range(NUM_EPOCHS):
# forward pass
# use linear transformation ('weighted sum then concat') to combine results from different nodes
# into an output feature map to be fed into the next neighbour node for further processing
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
for e in range(NUM_OF_MIXED_OPS):
x = 0 # depends on the input tensor dimension requirement
if c == 0:
if train_or_val == 'val':
x = val_inputs
else:
x = train_inputs
else:
# Uses feature map output from previous neighbour node for further processing
x = graph.cells[c].nodes[n-1].connections[cc].combined_feature_map
# need to take care of tensors dimension mismatch
graph.cells[c].nodes[n].connections[cc].combined_feature_map += \
graph.cells[c].nodes[n].connections[cc].edge_weights[e] * \
graph.cells[c].nodes[n].connections[cc].edges[e].forward_f(x) # Lval(w*, alpha)
outputs2 = graph.cells[NUM_OF_CELLS-1].output
if USE_CUDA:
outputs2 = outputs2.cuda()
if train_or_val == 'val':
loss = criterion(outputs2, val_labels)
else:
loss = criterion(outputs2, train_labels)
if forward_pass_only == 0:
# backward pass
Lval = loss
Lval = Lval.requires_grad_()
Lval.backward()
optimizer2.step()
else:
# no need to save model parameters for next epoch
return loss
# DARTS's approximate architecture gradient. Refer to equation (8)
# needs to save intermediate trained model for Lval
path = './model.pth'
torch.save(graph, path)
sigma = LEARNING_RATE
epsilon = 0.01 / torch.norm(Lval)
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
CC = graph.cells[c].nodes[n].connections[cc]
for e in range(NUM_OF_MIXED_OPS):
for w in graph.cells[c].nodes[n].connections[cc].edges[e].f.parameters():
# https://mythrex.github.io/math_behind_darts/
# Finite Difference Method
CC.weight_plus = w + epsilon * Lval
CC.weight_minus = w - epsilon * Lval
# Backups original f_weights
CC.f_weights_backup = w
# replaces f_weights with weight_plus before NN training
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
CC = graph.cells[c].nodes[n].connections[cc]
for e in range(NUM_OF_MIXED_OPS):
for w in graph.cells[c].nodes[n].connections[cc].edges[e].f.parameters():
w = CC.weight_plus
# test NN to obtain loss
Ltrain_plus = train_architecture(forward_pass_only=1, train_or_val='train')
# replaces f_weights with weight_minus before NN training
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
CC = graph.cells[c].nodes[n].connections[cc]
for e in range(NUM_OF_MIXED_OPS):
for w in graph.cells[c].nodes[n].connections[cc].edges[e].f.parameters():
w = CC.weight_minus
# test NN to obtain loss
Ltrain_minus = train_architecture(forward_pass_only=1, train_or_val='train')
# Restores original f_weights
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
CC = graph.cells[c].nodes[n].connections[cc]
for e in range(NUM_OF_MIXED_OPS):
for w in graph.cells[c].nodes[n].connections[cc].edges[e].f.parameters():
w = CC.f_weights_backup
print("after multiple for-loops")
L2train_Lval = (Ltrain_plus - Ltrain_minus) / (2 * epsilon)
return Lval - L2train_Lval
if __name__ == "__main__":
run_num = 0
not_converged = 1
while not_converged:
print("run_num = ", run_num)
ltrain = train_NN(forward_pass_only=0)
print("Finished train_NN()")
# 'train_or_val' to differentiate between using training dataset and validation dataset
lval = train_architecture(forward_pass_only=0, train_or_val='val')
print("Finished train_architecture()")
print("lval = ", lval, " , ltrain = ", ltrain)
not_converged = (lval > 0.01) or (ltrain > 0.01)
run_num = run_num + 1
# do test thing
Hi @promach,
that is because you’re printing the grad_fn directly in the init method. Therefore the Tensor is created by the user (you) and is not the result of an operation what is why grad_fn=None.
Regards,
Unity05
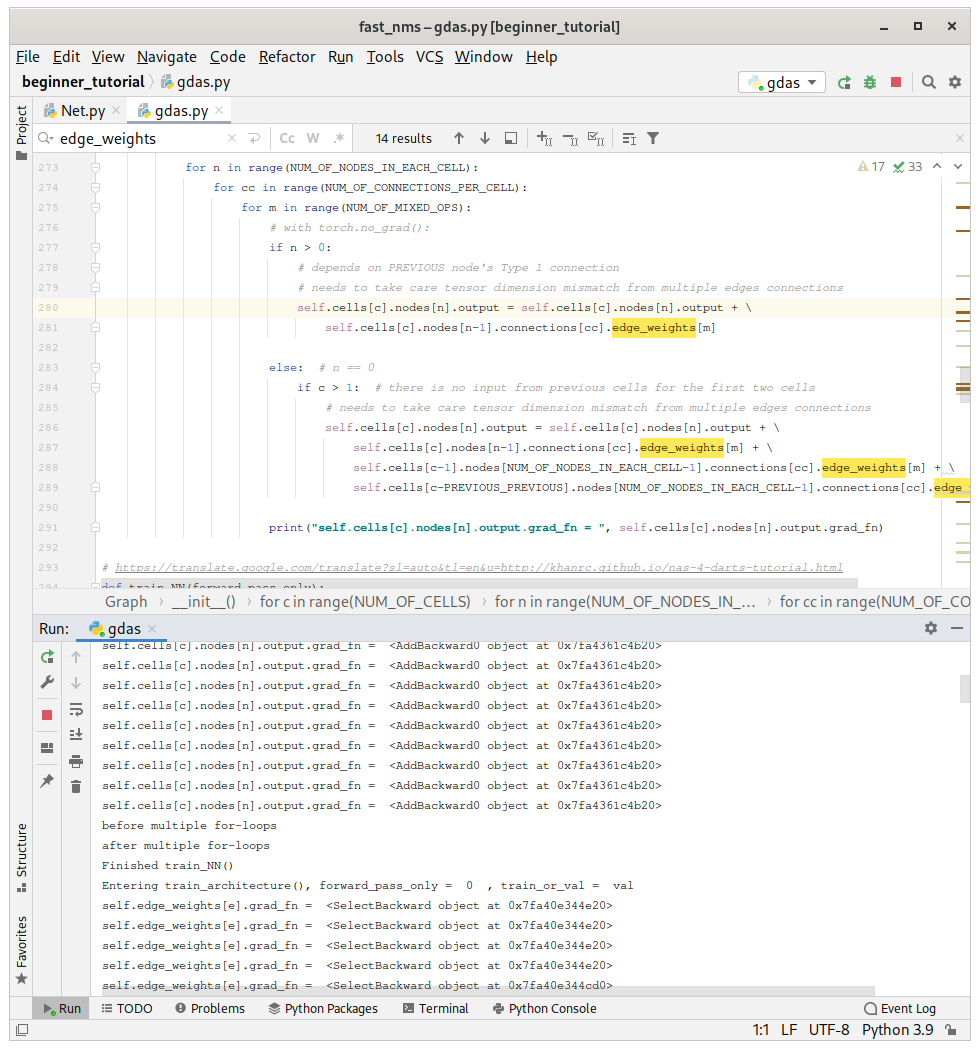
Now there is no more grad_fn = None issue, but why does the training loss still stay the same ?
# https://github.com/D-X-Y/AutoDL-Projects/issues/99
import torch
import torch.utils.data
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
# import numpy as np
USE_CUDA = torch.cuda.is_available()
# https://arxiv.org/pdf/1806.09055.pdf#page=12
TEST_DATASET_RATIO = 0.5 # 50 percent of the dataset is dedicated for testing purpose
BATCH_SIZE = 4
NUM_OF_IMAGE_CHANNELS = 3 # RGB
IMAGE_HEIGHT = 32
IMAGE_WIDTH = 32
NUM_OF_IMAGE_CLASSES = 10
SIZE_OF_HIDDEN_LAYERS = 64
NUM_EPOCHS = 1
LEARNING_RATE = 0.025
MOMENTUM = 0.9
NUM_OF_CELLS = 8
NUM_OF_MIXED_OPS = 4
NUM_OF_PREVIOUS_CELLS_OUTPUTS = 2 # last_cell_output , second_last_cell_output
NUM_OF_NODES_IN_EACH_CELL = 4
NUM_OF_CONNECTIONS_PER_CELL = NUM_OF_PREVIOUS_CELLS_OUTPUTS + NUM_OF_NODES_IN_EACH_CELL
NUM_OF_CHANNELS = 16
INTERVAL_BETWEEN_REDUCTION_CELLS = 3
PREVIOUS_PREVIOUS = 2 # (n-2)
REDUCTION_STRIDE = 2
NORMAL_STRIDE = 1
TAU_GUMBEL = 0.5
EDGE_WEIGHTS_NETWORK_IN_SIZE = 5
EDGE_WEIGHTS_NETWORK_OUT_SIZE = 2
# https://pytorch.org/tutorials/beginner/blitz/cifar10_tutorial.html
transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
trainset = torchvision.datasets.CIFAR10(root='./data', train=True,
download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=BATCH_SIZE,
shuffle=True, num_workers=2)
valset = torchvision.datasets.CIFAR10(root='./data', train=False,
download=True, transform=transform)
valloader = torch.utils.data.DataLoader(valset, batch_size=BATCH_SIZE,
shuffle=False, num_workers=2)
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
TRAIN_BATCH_SIZE = int(len(trainset) * (1 - TEST_DATASET_RATIO))
# https://discordapp.com/channels/687504710118146232/703298739732873296/853270183649083433
# for training for edge weights as well as internal NN function weights
class Edge(nn.Module):
def __init__(self):
super(Edge, self).__init__()
# https://stackoverflow.com/a/51027227/8776167
# self.linear = nn.Linear(EDGE_WEIGHTS_NETWORK_IN_SIZE, EDGE_WEIGHTS_NETWORK_OUT_SIZE)
# https://pytorch.org/docs/stable/generated/torch.nn.parameter.Parameter.html
self.weights = nn.Parameter(torch.zeros(1),
requires_grad=True) # for edge weights, not for internal NN function weights
def __freeze_w(self):
self.weights.requires_grad = False
def __unfreeze_w(self):
self.weights.requires_grad = True
def __freeze_f(self):
for param in self.f.parameters():
param.requires_grad = False
def __unfreeze_f(self):
for param in self.f.parameters():
param.requires_grad = True
# for NN functions internal weights training
def forward_f(self, x):
self.__unfreeze_f()
self.__freeze_w()
# inheritance in python classes and SOLID principles
# https://en.wikipedia.org/wiki/SOLID
# https://blog.cleancoder.com/uncle-bob/2020/10/18/Solid-Relevance.html
return self.f(x)
# self-defined initial NAS architecture, for supernet architecture edge weight training
def forward_edge(self, x):
self.__freeze_f()
self.__unfreeze_w()
return x * self.weights
class ConvEdge(Edge):
def __init__(self, stride):
super().__init__()
self.f = nn.Conv2d(in_channels=3, out_channels=3, kernel_size=(3, 3), stride=(stride, stride), padding=1)
class LinearEdge(Edge):
def __init__(self):
super().__init__()
self.f = nn.Linear(84, 10)
class MaxPoolEdge(Edge):
def __init__(self, stride):
super().__init__()
self.f = nn.MaxPool2d(kernel_size=3, stride=stride, padding=1, ceil_mode=True)
class AvgPoolEdge(Edge):
def __init__(self, stride):
super().__init__()
self.f = nn.AvgPool2d(kernel_size=3, stride=stride, padding=1, ceil_mode=True)
class Skip(nn.Module):
def forward(self, x):
return x
class SkipEdge(Edge):
def __init__(self):
super().__init__()
self.f = Skip()
# to collect and manage different edges between 2 nodes
class Connection(nn.Module):
def __init__(self, stride):
super(Connection, self).__init__()
if USE_CUDA:
# creates distinct edges and references each of them in a list (self.edges)
# self.linear_edge = LinearEdge().cuda()
self.conv2d_edge = ConvEdge(stride).cuda()
self.maxpool_edge = MaxPoolEdge(stride).cuda()
self.avgpool_edge = AvgPoolEdge(stride).cuda()
self.skip_edge = SkipEdge().cuda()
else:
# creates distinct edges and references each of them in a list (self.edges)
# self.linear_edge = LinearEdge()
self.conv2d_edge = ConvEdge(stride)
self.maxpool_edge = MaxPoolEdge(stride)
self.avgpool_edge = AvgPoolEdge(stride)
self.skip_edge = SkipEdge()
self.edges = [self.conv2d_edge, self.maxpool_edge, self.avgpool_edge, self.skip_edge]
self.edge_weights = torch.zeros(NUM_OF_MIXED_OPS, requires_grad=True)
# for approximate architecture gradient
self.f_weights = [None] * NUM_OF_MIXED_OPS
self.f_weights_backup = [None] * NUM_OF_MIXED_OPS
self.weight_plus = torch.zeros(NUM_OF_MIXED_OPS, requires_grad=True)
self.weight_minus = torch.zeros(NUM_OF_MIXED_OPS, requires_grad=True)
# use linear transformation (weighted summation) to combine results from different edges
self.combined_feature_map = torch.zeros([BATCH_SIZE, NUM_OF_IMAGE_CHANNELS, IMAGE_HEIGHT, IMAGE_WIDTH],
requires_grad=True)
if USE_CUDA:
self.combined_feature_map = self.combined_feature_map.cuda()
for e in range(NUM_OF_MIXED_OPS):
with torch.no_grad():
self.edge_weights[e] = self.edges[e].weights
print("self.edge_weights[e].grad_fn = ", self.edge_weights[e].grad_fn)
# https://stackoverflow.com/a/45024500/8776167 extracts the weights learned through NN functions
# self.f_weights[e] = list(self.edges[e].parameters())
# Refer to GDAS equations (5) and (6)
# if one_hot is already there, would summation be required given that all other entries are forced to 0 ?
# It's not required, but you don't know, which index is one hot encoded 1.
# https://pytorch.org/docs/stable/nn.functional.html#gumbel-softmax
gumbel = F.gumbel_softmax(self.edge_weights, tau=TAU_GUMBEL, hard=True)
self.chosen_edge = torch.argmax(gumbel, dim=0) # converts one-hot encoding into integer
# to collect and manage multiple different connections between a particular node and its neighbouring nodes
class Node(nn.Module):
def __init__(self, stride):
super(Node, self).__init__()
# two types of output connections
# Type 1: (multiple edges) output connects to the input of the other intermediate nodes
# Type 2: (single edge) output connects directly to the final output node
# Type 1
self.connections = nn.ModuleList([Connection(stride) for i in range(NUM_OF_CONNECTIONS_PER_CELL)])
# Type 2
# depends on PREVIOUS node's Type 1 output
self.output = torch.zeros(NUM_OF_IMAGE_CLASSES, requires_grad=True) # for initialization
# to manage all nodes within a cell
class Cell(nn.Module):
def __init__(self, stride):
super(Cell, self).__init__()
# all the coloured edges inside
# https://user-images.githubusercontent.com/3324659/117573177-20ea9a80-b109-11eb-9418-16e22e684164.png
# A single cell contains 'NUM_OF_NODES_IN_EACH_CELL' distinct nodes
# for the k-th node, we have (k+1) preceding nodes.
# Each intermediate state, 0->3 ('NUM_OF_NODES_IN_EACH_CELL-1'),
# is connected to each previous intermediate state
# as well as the output of the previous two cells, c_{k-2} and c_{k-1} (after a preprocessing layer).
# previous_previous_cell_output = c_{k-2}
# previous_cell_output = c{k-1}
self.nodes = nn.ModuleList([Node(stride) for i in range(NUM_OF_NODES_IN_EACH_CELL)])
# just for variables initialization
self.previous_cell = 0
self.previous_previous_cell = 0
self.output = torch.zeros(NUM_OF_NODES_IN_EACH_CELL, NUM_OF_IMAGE_CLASSES, requires_grad=True)
for n in range(NUM_OF_NODES_IN_EACH_CELL):
# 'add' then 'concat' feature maps from different nodes
# needs to take care of tensor dimension mismatch
# See https://github.com/D-X-Y/AutoDL-Projects/issues/99#issuecomment-869100416
with torch.no_grad():
self.output += self.nodes[n].output
# to manage all nodes
class Graph(nn.Module):
def __init__(self):
super(Graph, self).__init__()
stride = 0 # just to initialize a variable
for i in range(NUM_OF_CELLS):
if i % INTERVAL_BETWEEN_REDUCTION_CELLS == 0:
stride = REDUCTION_STRIDE # to emulate reduction cell by using normal cell with stride=2
else:
stride = NORMAL_STRIDE # normal cell
self.cells = nn.ModuleList([Cell(stride) for i in range(NUM_OF_CELLS)])
# https://www.reddit.com/r/learnpython/comments/no7btk/how_to_carry_extra_information_across_dag/
# https://docs.python.org/3/tutorial/datastructures.html
# generates a supernet consisting of 'NUM_OF_CELLS' cells
# each cell contains of 'NUM_OF_NODES_IN_EACH_CELL' nodes
# refer to PNASNet https://arxiv.org/pdf/1712.00559.pdf#page=5 for the cell arrangement
# https://pytorch.org/tutorials/beginner/examples_autograd/two_layer_net_custom_function.html
# encodes the cells and nodes arrangement in the multigraph
for c in range(NUM_OF_CELLS):
if c > 1: # for previous_previous_cell, (c-2)
self.cells[c].previous_cell = self.cells[c-1].output
self.cells[c].previous_previous_cell = self.cells[c-PREVIOUS_PREVIOUS].output
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
for m in range(NUM_OF_MIXED_OPS):
# with torch.no_grad():
if n > 0:
# depends on PREVIOUS node's Type 1 connection
# needs to take care tensor dimension mismatch from multiple edges connections
self.cells[c].nodes[n].output = self.cells[c].nodes[n].output + \
self.cells[c].nodes[n-1].connections[cc].edge_weights[m]
else: # n == 0
if c > 1: # there is no input from previous cells for the first two cells
# needs to take care tensor dimension mismatch from multiple edges connections
self.cells[c].nodes[n].output = self.cells[c].nodes[n].output + \
self.cells[c].nodes[n-1].connections[cc].edge_weights[m] + \
self.cells[c-1].nodes[NUM_OF_NODES_IN_EACH_CELL-1].connections[cc].edge_weights[m] + \
self.cells[c-PREVIOUS_PREVIOUS].nodes[NUM_OF_NODES_IN_EACH_CELL-1].connections[cc].edge_weights[m]
print("self.cells[c].nodes[n].output.grad_fn = ", self.cells[c].nodes[n].output.grad_fn)
# https://translate.google.com/translate?sl=auto&tl=en&u=http://khanrc.github.io/nas-4-darts-tutorial.html
def train_NN(forward_pass_only):
print("Entering train_NN(), forward_pass_only = ", forward_pass_only)
graph = Graph()
# for param in graph.parameters():
# print(param.grad)
if USE_CUDA:
graph = graph.cuda()
criterion = nn.CrossEntropyLoss()
optimizer1 = optim.SGD(graph.parameters(), lr=LEARNING_RATE, momentum=MOMENTUM)
# just for initialization, no special meaning
Ltrain = 0
train_inputs = 0
train_labels = 0
if forward_pass_only == 0:
# do train thing for architecture edge weights
graph.train()
# zero the parameter gradients
optimizer1.zero_grad()
print("before multiple for-loops")
for train_data, val_data in (zip(trainloader, valloader)):
train_inputs, train_labels = train_data
# val_inputs, val_labels = val_data
if USE_CUDA:
train_inputs = train_inputs.cuda()
train_labels = train_labels.cuda()
for epoch in range(NUM_EPOCHS):
# forward pass
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
for e in range(NUM_OF_MIXED_OPS):
if c == 0:
x = train_inputs
else:
# Uses feature map output from previous neighbour node for further processing
x = graph.cells[c].nodes[n-1].connections[cc].combined_feature_map
if USE_CUDA:
x = x.cuda()
# combines all the feature maps from different mixed ops edges
graph.cells[c].nodes[n].connections[cc].combined_feature_map += \
graph.cells[c].nodes[n].connections[cc].edges[e].forward_edge(x) # Ltrain(w±, alpha)
outputs1 = graph.cells[NUM_OF_CELLS-1].output
if USE_CUDA:
outputs1 = outputs1.cuda()
Ltrain = criterion(outputs1, train_labels)
if forward_pass_only == 0:
# backward pass
Ltrain = Ltrain.requires_grad_()
Ltrain.backward()
optimizer1.step()
else:
# no need to save model parameters for next epoch
return Ltrain
# DARTS's approximate architecture gradient. Refer to equation (8)
# needs to save intermediate trained model for Ltrain
path = './model.pth'
torch.save(graph, path)
print("after multiple for-loops")
return Ltrain
def train_architecture(forward_pass_only, train_or_val='val'):
print("Entering train_architecture(), forward_pass_only = ", forward_pass_only, " , train_or_val = ", train_or_val)
graph = Graph()
# for param in graph.parameters():
# print(param.grad)
if USE_CUDA:
graph = graph.cuda()
criterion = nn.CrossEntropyLoss()
optimizer2 = optim.SGD(graph.parameters(), lr=LEARNING_RATE, momentum=MOMENTUM)
# just for initialization, no special meaning
Lval = 0
train_inputs = 0
train_labels = 0
val_inputs = 0
val_labels = 0
if forward_pass_only == 0:
# do train thing for internal NN function weights
graph.train()
# zero the parameter gradients
optimizer2.zero_grad()
print("before multiple for-loops")
for train_data, val_data in (zip(trainloader, valloader)):
train_inputs, train_labels = train_data
val_inputs, val_labels = val_data
if USE_CUDA:
train_inputs = train_inputs.cuda()
train_labels = train_labels.cuda()
val_inputs = val_inputs.cuda()
val_labels = val_labels.cuda()
for epoch in range(NUM_EPOCHS):
# forward pass
# use linear transformation ('weighted sum then concat') to combine results from different nodes
# into an output feature map to be fed into the next neighbour node for further processing
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
for e in range(NUM_OF_MIXED_OPS):
x = 0 # depends on the input tensor dimension requirement
if c == 0:
if train_or_val == 'val':
x = val_inputs
else:
x = train_inputs
else:
# Uses feature map output from previous neighbour node for further processing
x = graph.cells[c].nodes[n-1].connections[cc].combined_feature_map
# need to take care of tensors dimension mismatch
graph.cells[c].nodes[n].connections[cc].combined_feature_map += \
graph.cells[c].nodes[n].connections[cc].edge_weights[e] * \
graph.cells[c].nodes[n].connections[cc].edges[e].forward_f(x) # Lval(w*, alpha)
outputs2 = graph.cells[NUM_OF_CELLS-1].output
if USE_CUDA:
outputs2 = outputs2.cuda()
if train_or_val == 'val':
loss = criterion(outputs2, val_labels)
else:
loss = criterion(outputs2, train_labels)
if forward_pass_only == 0:
# backward pass
Lval = loss
Lval = Lval.requires_grad_()
Lval.backward()
optimizer2.step()
else:
# no need to save model parameters for next epoch
return loss
# DARTS's approximate architecture gradient. Refer to equation (8)
# needs to save intermediate trained model for Lval
path = './model.pth'
torch.save(graph, path)
sigma = LEARNING_RATE
epsilon = 0.01 / torch.norm(Lval)
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
CC = graph.cells[c].nodes[n].connections[cc]
for e in range(NUM_OF_MIXED_OPS):
for w in graph.cells[c].nodes[n].connections[cc].edges[e].f.parameters():
# https://mythrex.github.io/math_behind_darts/
# Finite Difference Method
CC.weight_plus = w + epsilon * Lval
CC.weight_minus = w - epsilon * Lval
# Backups original f_weights
CC.f_weights_backup = w
# replaces f_weights with weight_plus before NN training
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
CC = graph.cells[c].nodes[n].connections[cc]
for e in range(NUM_OF_MIXED_OPS):
for w in graph.cells[c].nodes[n].connections[cc].edges[e].f.parameters():
w = CC.weight_plus
# test NN to obtain loss
Ltrain_plus = train_architecture(forward_pass_only=1, train_or_val='train')
# replaces f_weights with weight_minus before NN training
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
CC = graph.cells[c].nodes[n].connections[cc]
for e in range(NUM_OF_MIXED_OPS):
for w in graph.cells[c].nodes[n].connections[cc].edges[e].f.parameters():
w = CC.weight_minus
# test NN to obtain loss
Ltrain_minus = train_architecture(forward_pass_only=1, train_or_val='train')
# Restores original f_weights
for c in range(NUM_OF_CELLS):
for n in range(NUM_OF_NODES_IN_EACH_CELL):
for cc in range(NUM_OF_CONNECTIONS_PER_CELL):
CC = graph.cells[c].nodes[n].connections[cc]
for e in range(NUM_OF_MIXED_OPS):
for w in graph.cells[c].nodes[n].connections[cc].edges[e].f.parameters():
w = CC.f_weights_backup
print("after multiple for-loops")
L2train_Lval = (Ltrain_plus - Ltrain_minus) / (2 * epsilon)
return Lval - L2train_Lval
if __name__ == "__main__":
run_num = 0
not_converged = 1
while not_converged:
print("run_num = ", run_num)
ltrain = train_NN(forward_pass_only=0)
print("Finished train_NN()")
# 'train_or_val' to differentiate between using training dataset and validation dataset
lval = train_architecture(forward_pass_only=0, train_or_val='val')
print("Finished train_architecture()")
print("lval = ", lval, " , ltrain = ", ltrain)
not_converged = (lval > 0.01) or (ltrain > 0.01)
run_num = run_num + 1
# do test thing
``wait, I scrolled through the run output.
There are still some grad_fn = None for the same variable ?
Yeah, if you look closely to your condition construct, you can see that cell - node - combinations with c ∈ {0, 1} and n = 0 are not handled there.
https://github.com/promach/gdas had fixed the grad_fn=None issue, but training loss still stays the same across epochs.
What else am I missing ?
Gonna take a deeper look into it after my exam is over.