Hi everyone,
I am working on a project where a NN is used as a controller in a classic control problem (the inverted pendulum system). The problem is that the loss of the NN keeps increasing in each epoch. It seems that the NN has learn nothing and I wonder if the problem results from my design of the loss function.
Epoch 1
-------------------------------
loss: 12.320100
loss: 12.357852
loss: 12.433514
loss: 12.547467
loss: 12.700330
loss: 12.892957
loss: 13.126448
loss: 13.402157
loss: 13.721689
loss: 14.086917
loss: 14.499980
loss: 14.963307
loss: 15.479626
loss: 16.051975
loss: 16.683731
loss: 17.378611
loss: 18.140713
loss: 18.974531
loss: 19.884983
loss: 20.877436
loss: 21.957741
loss: 23.132269
loss: 24.407934
loss: 25.792259
loss: 27.293400
loss: 28.920189
loss: 30.682211
loss: 32.589840
loss: 34.654293
loss: 36.887722
loss: 39.303268
loss: 41.915127
loss: 44.738659
loss: 47.790466
loss: 51.088482
loss: 54.652081
loss: 58.502201
loss: 62.661446
loss: 67.154251
loss: 72.007004
loss: 77.248177
loss: 82.908539
loss: 89.021301
loss: 95.622337
loss: 102.750381
loss: 110.447235
loss: 118.758064
loss: 127.731606
loss: 137.420471
loss: 147.881485
loss: 159.175980
loss: 171.370178
loss: 184.535568
loss: 198.749283
loss: 214.094696
loss: 230.661697
loss: 248.547379
loss: 267.856598
loss: 288.702484
loss: 311.207184
loss: 335.502533
loss: 361.730896
loss: 390.045929
loss: 420.613556
loss: 453.612793
loss: 489.236969
loss: 527.694763
loss: 569.211426
loss: 614.030212
loss: 662.413452
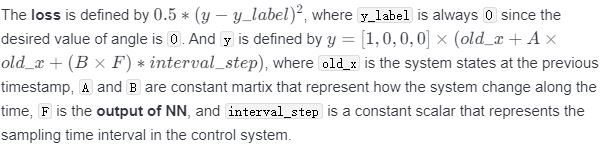
The NN takes in the system states as input ( a 4*1 vector representing angle, angular velocity, displacement, and velocity ) and outputs a force F, which is the control signal. F changes the states of the system by x'=Ax+BF and the purpose of the NN is to generate proper F to keep the angle 0.
Different from the usual supervised learning, the label value of F is not known. Thus, I design the loss function based on the purpose and the relation between F and the angle.
Another difference is that the online learning style is used to train the NN. In each epoch, the training process is that I start the simulation of the inverted pendulum system, get the system states, input them to the NN, get the output F, calculate the system state at the next timestamp, calculate the loss, and update the weights of the NN. In short, the batchsize is 1.
I will be very appreciated if anyone can help me, Thx.
And my code is below.
import matplotlib.pyplot as plt
import numpy as np
import time
from matplotlib.animation import FuncAnimation
import torch
from torch import nn
from torchviz import make_dot
#------------------------------------------------------------------------- Define model
class NeuralNetwork(nn.Module):
def __init__(self):
super().__init__()
self.linear_relu_stack = nn.Sequential(
nn.Linear(4, 32),
nn.ReLU(),
nn.Linear(32, 8),
nn.ReLU(),
nn.Linear(8, 1)
)
def forward(self, x):
x = x.reshape((1,4))
logits = self.linear_relu_stack(x)
return logits
#-------------------------------------------------------------------------------define simulation and training in each epoch
def train(model, loss_fn, optimizer):
# total simulation time interval /seconds
t_time = 8
# time interval of each step /seconds
interval_step = 0.01
# total simulation loop numbers
loop = int(t_time / interval_step)
# print(loop)
model.train()
A = np.array([[0, 1, 0, 0], [15.244, 0, 0, 0], [0, 0, 0, 1], [-0.363, 0, 0, 0]])
A=torch.tensor(A,dtype=torch.float32)
B = np.array([[0], [-0.741], [0], [0.494]])
B = torch.tensor(B, dtype=torch.float32)
x_init = np.array([[round(np.random.uniform(-1, 1), 3) * 10], [0], [0], [0]])
#print(x_init)
x = x_init
F_list=[]
#start simulation loop
for i in range(loop):
old_x=x
old_x=torch.tensor(old_x,dtype=torch.float32)
#x'=Ax+Bu
F = model(old_x)
F_list.append(F)
interval_step_=torch.tensor(interval_step)
y= ( old_x + (torch.mm(A,old_x)+torch.mm(B,F))*interval_step_ )
x=y.detach().numpy()
y=torch.mm(torch.tensor([ [1,0,0,0] ] , dtype=torch.float32),y)
y_label=torch.tensor([[0.0]],dtype=torch.float32)
loss = loss_fn(y,y_label )
optimizer.zero_grad()
loss.backward()
optimizer.step()
loss= loss.item()
print(f"loss: {loss:>7f}")
if x[0][0]>25 or x[0][0]<-25: #angle bigger than 25 degree, means that the control fails
print("control fail in {} seconds".format(i*interval_step))
break
if __name__=="__main__":
model = NeuralNetwork()
print(model)
loss_fn = nn.MSELoss(reduction='sum')
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
epochs = 100
for t in range(epochs):
print(f"Epoch {t + 1}\n-------------------------------")
train(model, loss_fn, optimizer)
print("training Done!")
'''torch.save(model.state_dict(), "model-my-simu-pendulum.pth")
print("Saved PyTorch Model State to model-pendulum.pth")'''